




Color
Descripción
DESCRIPCIÓN

RoArm-M2-S es un brazo robótico inteligente 4DOF diseñado para aplicaciones innovadoras.Adopta un diseño de estructura liviana con un peso total inferior a 850 g y la carga útil efectiva de 0,5 kg a 0,5 m, se puede montar de forma flexible en varias plataformas móviles.Adopta un 360°base omnidireccional combinada con tres juntas flexibles para crear un espacio de trabajo con un diámetro de 1 metro.
El diseño de unión de accionamiento directo mejora la precisión del reposicionamiento y también mejora la confiabilidad estructural, con la innovadora tecnología de doble accionamiento que duplica el par de la articulación del hombro.El módulo de control principal MCU ESP32 integrado admite múltiples modos de control inalámbrico, proporciona interfaces de control y protocolos de comunicación enriquecidos para conectarse fácilmente a varios dispositivos.
Proporciona una aplicación WEB multiplataforma fácil de usar que integra un modo de control de coordenadas simple y visualizado, lo que facilita el inicio.Viene con ricos tutoriales gráficos y en vídeo para ayudarle a aprender y usarlo rápidamente.Compatible con ROS2 y varias computadoras host, admite varios modos de comunicación inalámbrica y por cable.Viene con una placa de expansión, admite la personalización de EoAT (End of Arm Tooling) para cumplir con los requisitos de aplicaciones innovadores.
RoArm-M2-S logra un excelente equilibrio entre ligereza, facilidad de uso, capacidad de expansión e innovación abierta; es un brazo robótico multifuncional que integra control inteligente, interacción hombre-máquina y desarrollo personalizable.Ideal para aplicaciones que requieren una combinación de flexibilidad, capacidad de ampliación y facilidad de uso.

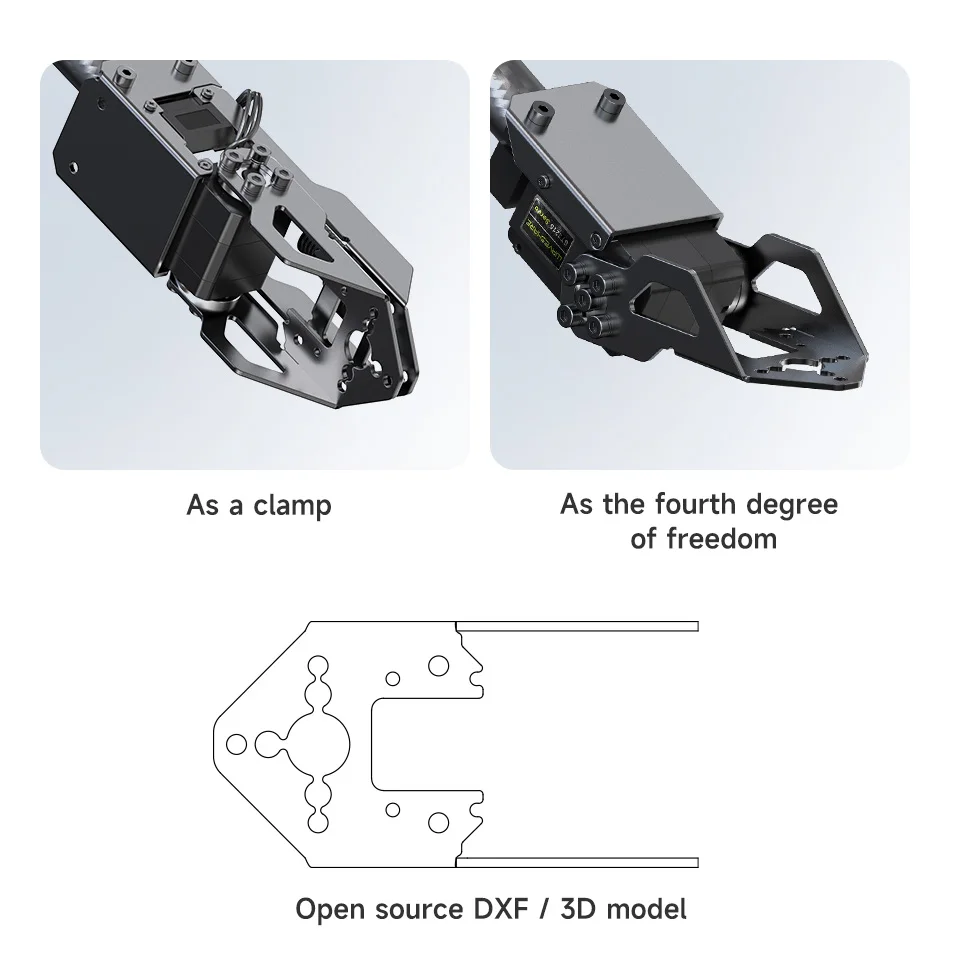
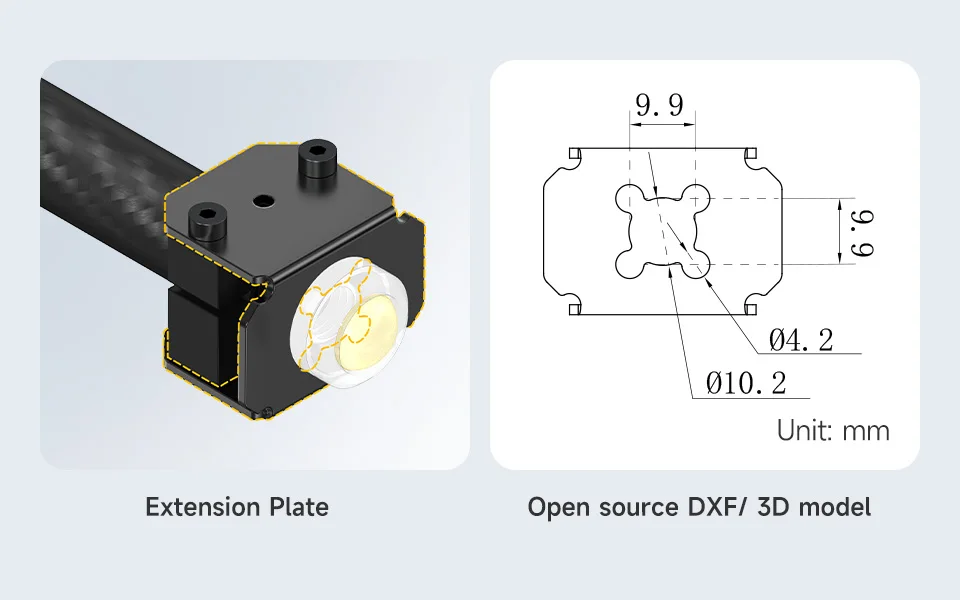
El EoAT admite varios métodos de montaje, se puede utilizar como abrazadera o como cuarto grado de libertad.Proporciona modelos DXF y 3D de código abierto para bricolaje y desarrollo secundario
Adopta 360° Base de rotación y juntas flexibles para crear un espacio operativo omnidireccional con un diámetro de 1 metro, lo que permite que la EoAT se mueva libremente en todas las direcciones

Aplicación web transversal
No se requiere instalación de aplicaciones, acceso después de ingresar la dirección.Permite a los usuarios conectar y controlar RoArm-M2-S a través de teléfonos móviles, tabletas y computadoras haciendo clic en los botones de la aplicación web.Admite el desarrollo secundario de esta aplicación web de código abierto para personalizar la interfaz de usuario y agregar nuevas funciones.

Desarrollo secundario
Fuente completamente abierta para los códigos de control y documentos de interfaz de comunicación de Roarm-M2-S, admite múltiples idiomas y dispositivos para el desarrollo secundario.Proporciona demostraciones y tutoriales modularizados para usuarios basados en cero, fáciles de comenzar.
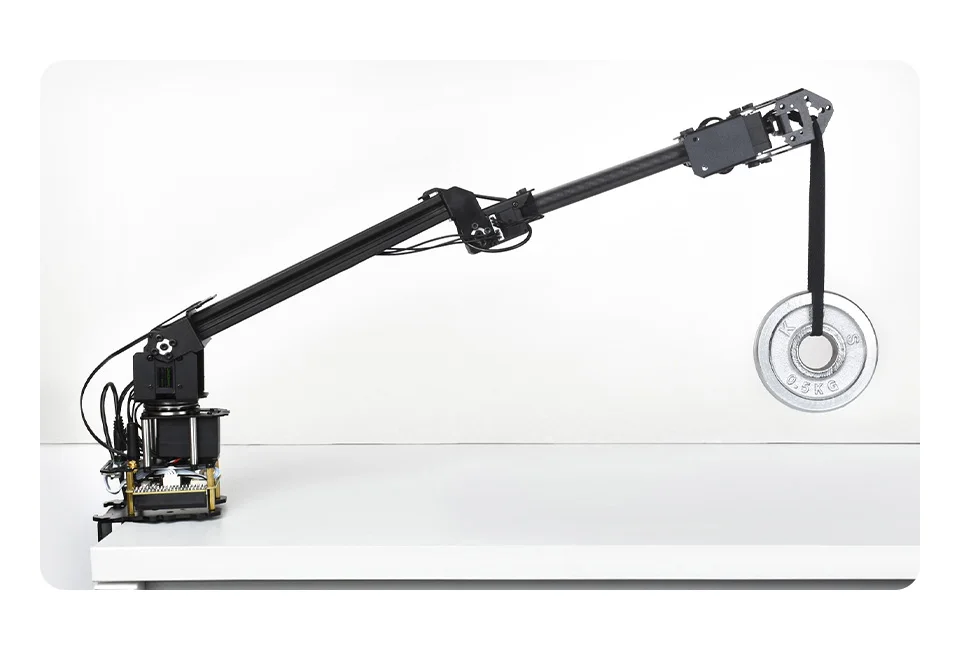
Cuerpo liviano con un peso total de menos de 850 g, adopta fibra de carbono
Y aleación de aluminio 5052 para garantizar la estabilidad bajo cargas pesadas,
Adecuado para varios chasis de robots móviles

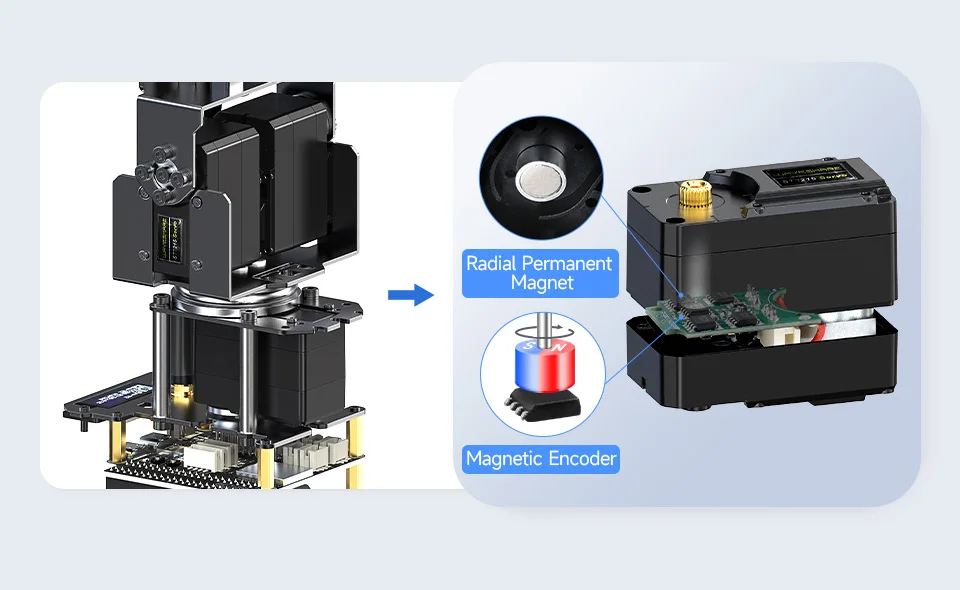
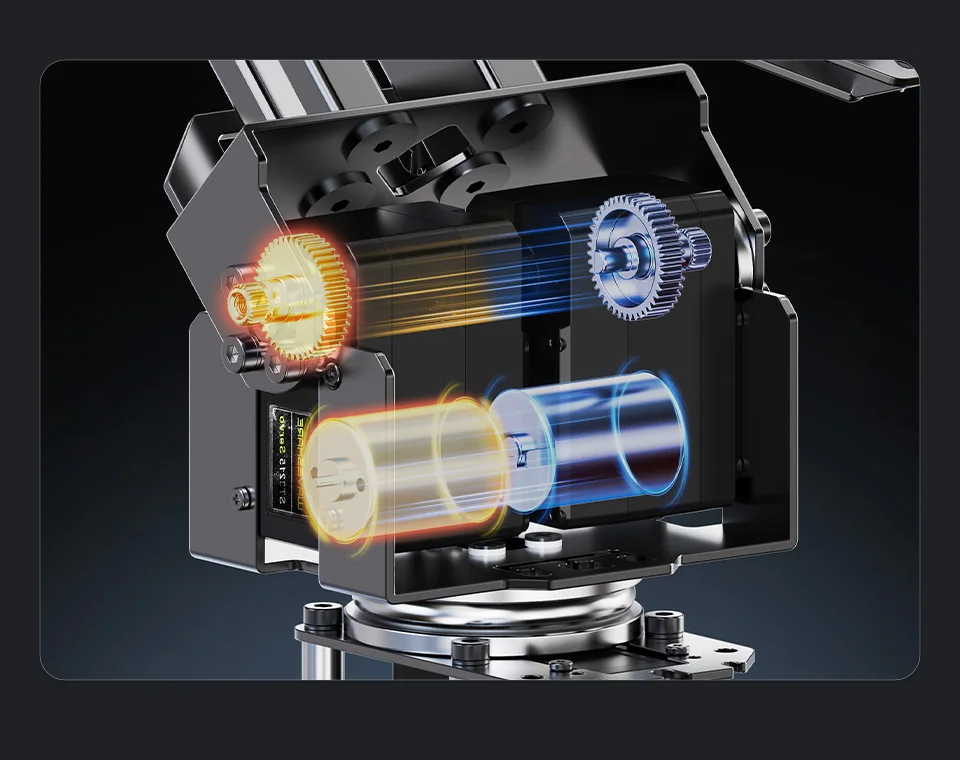
La precisión de retroalimentación es de hasta 0,088°
La retroalimentación del ángulo de la junta se puede obtener directamente a través de un codificador magnético de alta precisión de 12 bits sin ningún grupo de reducción, lo cual es más preciso, y la posición real del punto objetivo actual se puede calcular en función de la retroalimentación del ángulo de la junta.
Duplica el par de la articulación del hombro.
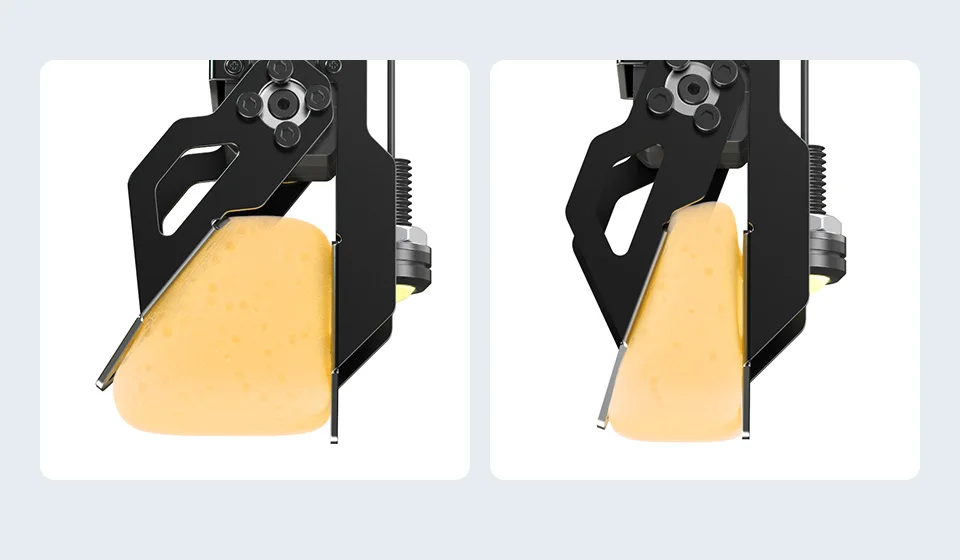
Control de fuerza
El diseño de abrazadera de accionamiento directo permite un control preciso de la fuerza de abrazadera en el programa, adecuado para sujetar objetos delicados sin aplicar fuerza excesiva.
Para compensar la influencia
De gravedad
Las uniones de HOMBRO y ELBOW permiten la instalación de las bandas elásticas para ayudar al brazo robótico, utilizando la contracción elástica de las bandas elásticas para compensar la influencia de la gravedad y aumentar la carga efectiva del brazo robótico.
Control adaptativo
Después de habilitar esta función, puede limitar el par máximo de cada junta.Cuando la fuerza externa aplicada a la articulación excede el umbral de torsión (configurable), el brazo robótico girará en respuesta a la fuerza externa y volverá a la posición especificada cuando la fuerza externa disminuya por debajo del umbral de torsión.

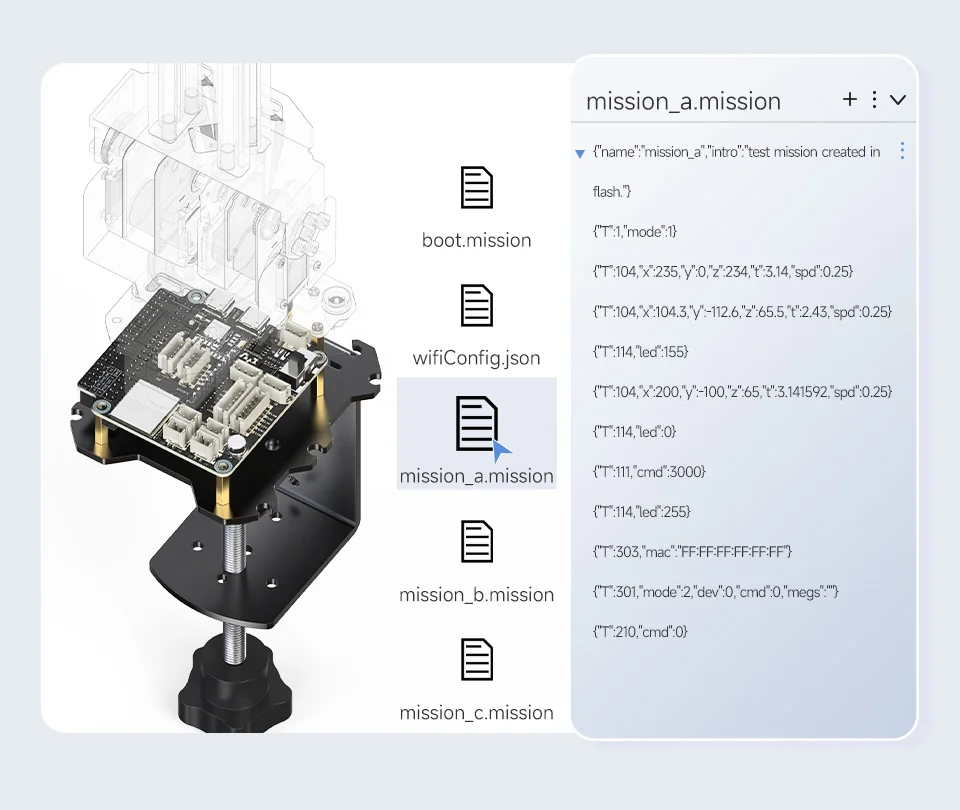
Acciones fáciles de crear
RoArm-M2-S puede guardar las instrucciones de JSON para el control del robot como archivos de tareas.Los archivos de tareas se pueden guardar en Flash del ESP32, que no se perderá en caso de pérdida de energía.El brazo robótico puede realizar operaciones complejas y repetitivas llamando estos archivos de tareas.
Fuente abierta para el algoritmo de control de cinemática inversa en el sistema de coordenadas cartesianas tridimensionales.Después de ingresar a la posición objetivo, el brazo del robot puede alcanzar con precisión el punto objetivo utilizando la función de cinemática inversa para calcular el ángulo de rotación de cada articulación.

Movimiento más suave
Utilizamos el algoritmo de control de velocidad de curva para que el brazo robótico se mueva más suave y de forma más natural, sin oscilaciones durante el inicio y la parada.

Colaboración remota de bajo retardo
ESP-NOW es un protocolo de comunicación inalámbrica ad hoc de bajo retardo, sin necesidad de infraestructuras de red.Puede utilizar un brazo robótico para controlar de forma inalámbrica otros brazos robóticos y los métodos de control se pueden configurar como control de transmisión, control de grupo y control uno a uno.
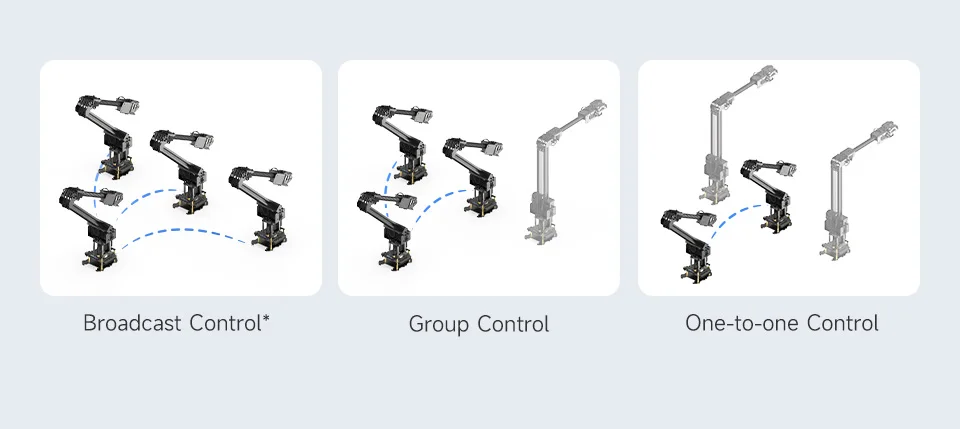
* Nota: El control de transmisión no tiene limitaciones para el número de dispositivos controlados, mientras que el control de grupo permite hasta 20 dispositivos.Consulte WIKI para obtener más detalles.
En el modo de control de seguimiento líder, el brazo robótico líder enviará su información de ángulo de articulación a otros brazos robóticos a través de la comunicación ESP-NOW.Los otros brazos robóticos que se encuentran en el modo ESP-NOW Follower imitarán las mismas acciones que el Líder en tiempo real.
Compatible con múltiples dispositivos y idiomas

RoArm-M2-S puede ser controlado no solo mediante la aplicación WEB, sino que también admite el uso de otros controladores para enviar comandos JSON a través de solicitud de red de protocolo HTTP, comunicación en serie o comunicación USB para controlar y obtener retroalimentación.

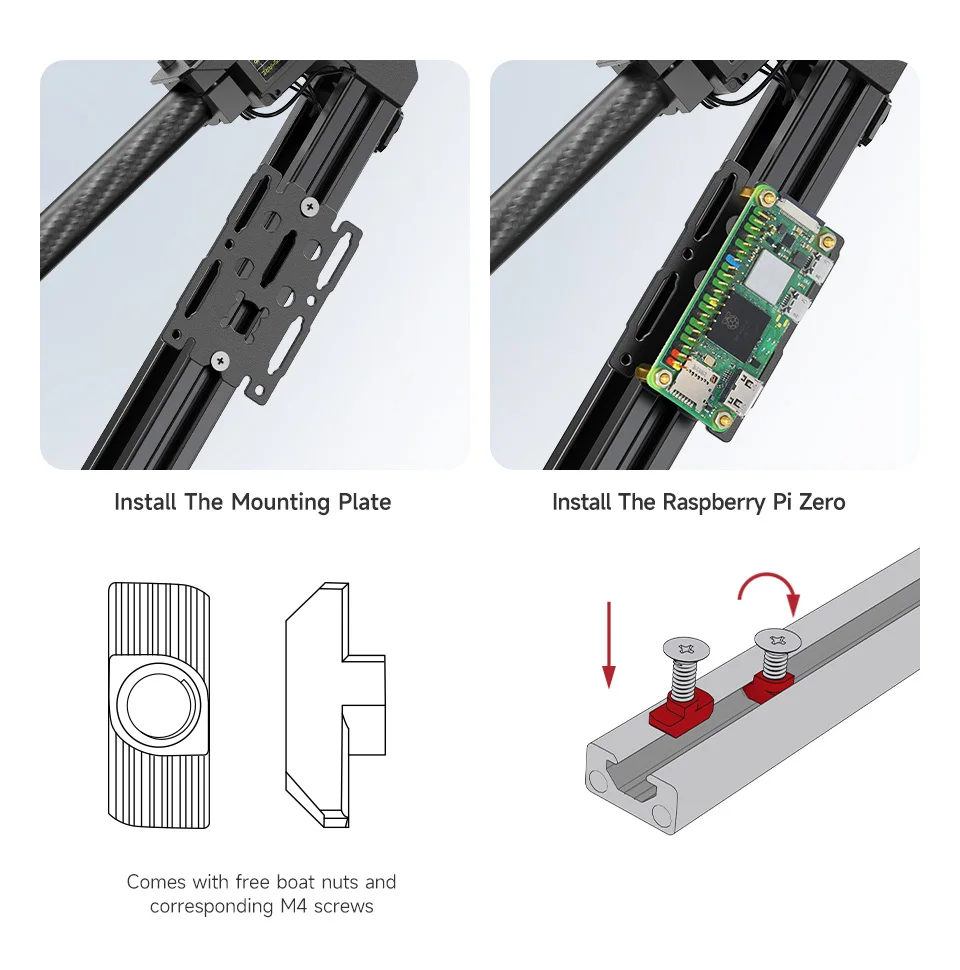
Proporciona múltiples esquemas de instalación y recursos de desarrollo secundarios relacionados, adecuados para diferentes escenarios de uso y se pueden integrar de manera flexible en sus proyectos y aplicaciones.

La estructura principal del brazo superior adopta dos rieles de aluminio estándar europeo 1020, admite la instalación de periféricos adicionales a través de las tuercas del barco para satisfacer diferentes necesidades.Viene con tuercas para barco y tornillos M4 correspondientes para una fácil instalación.
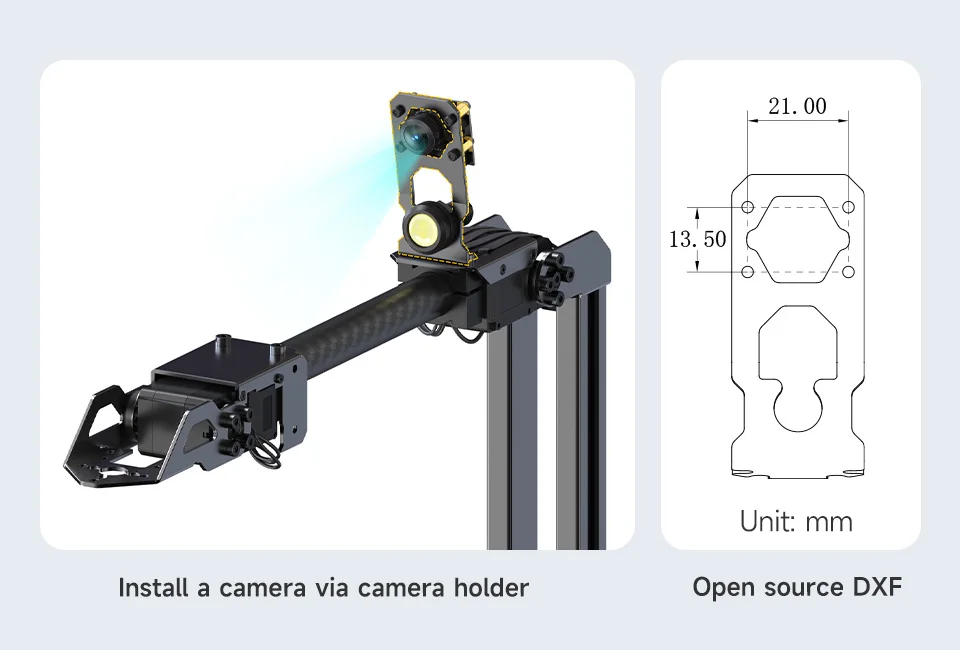
Para ampliar aplicaciones visuales
Viene con un soporte para cámara y código abierto para los dibujos relacionados.
Puede instalar directamente una cámara con el tamaño correspondiente u otras cámaras
Con un adaptador
Para más funciones

Adopta una potente MCU de control principal ESP32, admite múltiples protocolos de comunicación inalámbrica, con una gran cantidad de recursos de código abierto para ayudar al desarrollo secundario de aplicaciones innovadoras
Archivo y soportes de creación de modelos
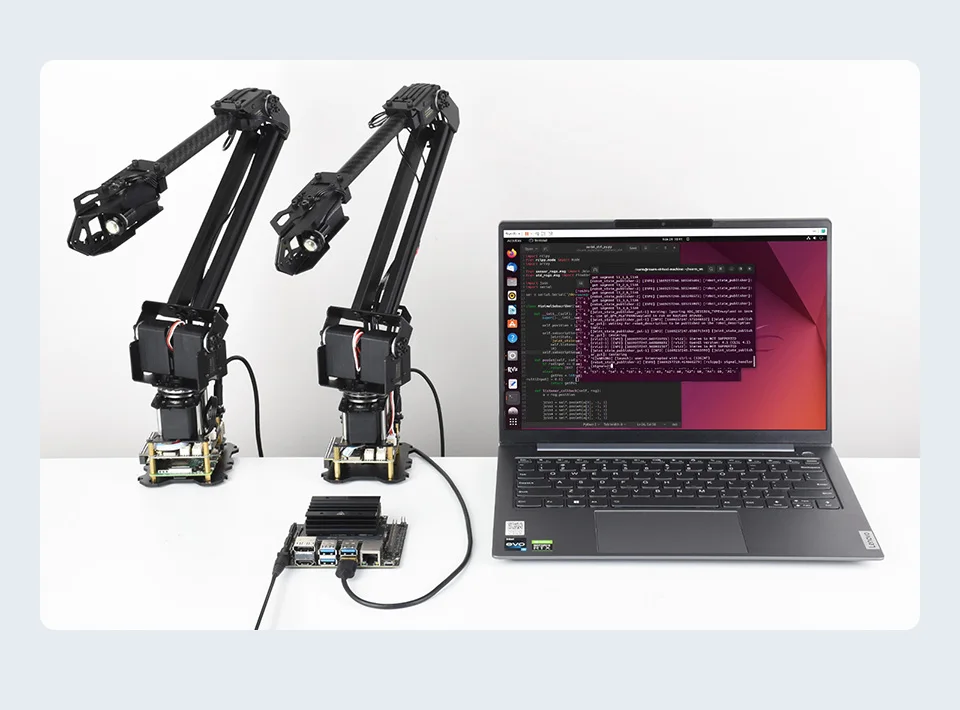
Cooperación de múltiples dispositivos
Proporciona nodos de comunicación de ROS2, archivo de descripción del modelo URDF y tutorial nero de ROS2
Desarrollo secundario
Ofrecemos tutoriales y casos completos de unidades, que incluyen varias funciones y escenarios de aplicación comunes, para ayudar a los usuarios a comenzar rápidamente para el desarrollo secundario.
Interfaces y recursos ricos integrados para un desarrollo innovador y una expansión funcional
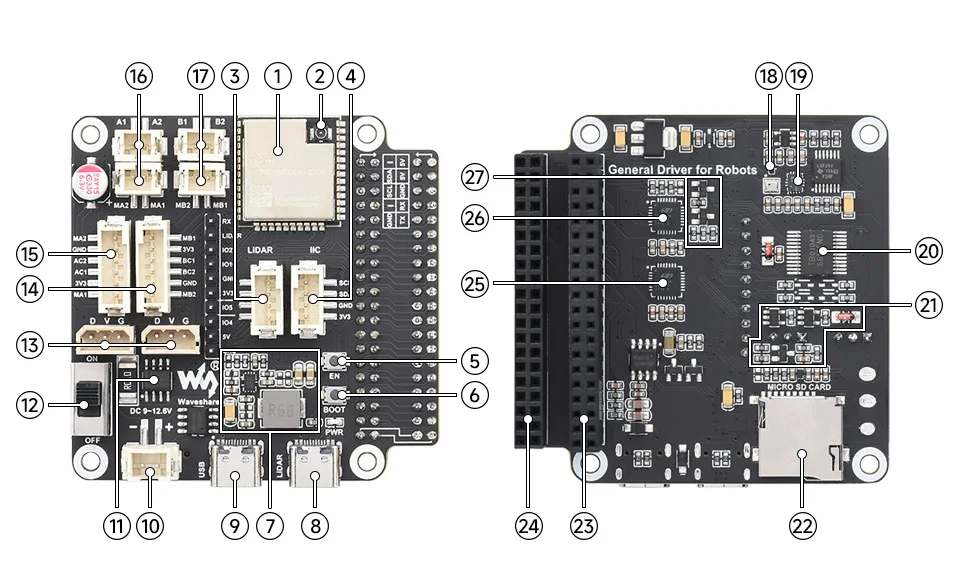
Módulo controlador ESP32-WROOM-32
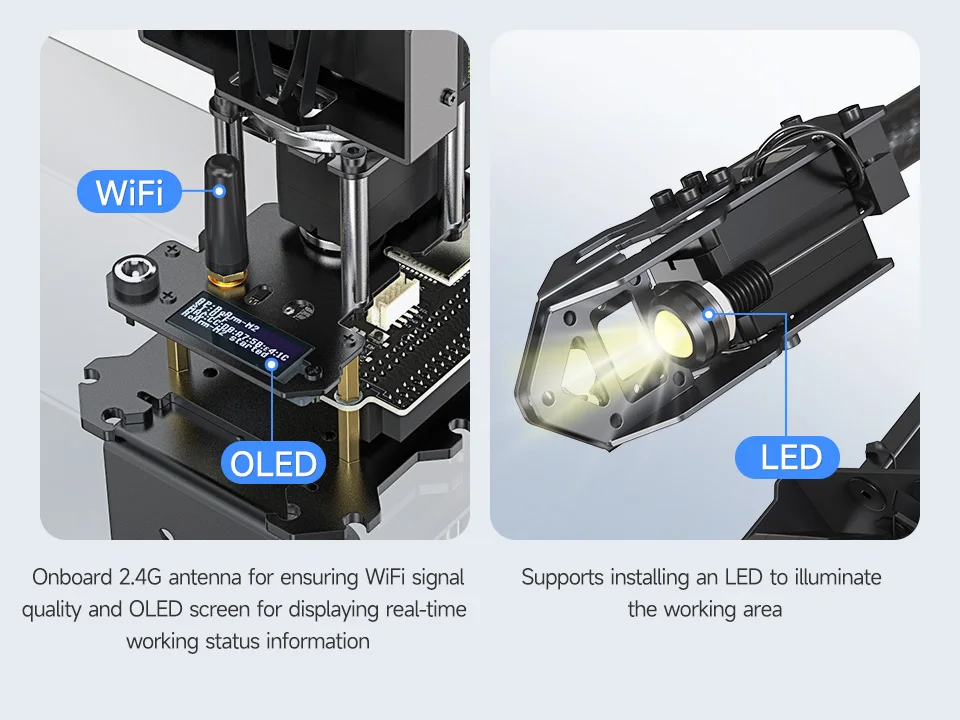
Se puede desarrollar utilizando Arduino IDEConector WIFI IPEX1
Para conectar una antena WIFI para aumentar la distancia de comunicación inalámbricaInterfaz LIDAR
Función de adaptador de radar integradaInterfaz de expansión periférica I2C
Para conectarse con pantalla OLED u otros sensores I2CBotón de reinicio
Presione y suelte para reiniciar el ESP32Botón de descarga
El ESP32 entrará en el modo de descarga después del encendido.Circuito regulador de voltaje DC-DC 5V
Fuente de alimentación para ordenadores host como Raspberry Pi o Jetson nanoPuerto tipo C (LADAR)
Transmisión de datos LIDARPuerto tipo C (USB)
Interfaz de comunicación ESP32, para cargar programas a ESP32Puerto de alimentación XH2.54
Admite entrada CC de 7 ~ 13 V, puede alimentar directamente los servos y motores del bus serieINA219
chip de monitoreo de voltaje/corrienteEncendido/apagado
Fuente de alimentación externa ON/OFFInterfaz servo de bus serie ST3215
Para conectar con servo de bus serie ST3215Interfaz del motor PH2.0 6P
Interfaz del grupo B para motor con codificador
Interfaz del motor PH2.0 6P
Interfaz de grupo A para motor con codificadorInterfaz del motor PH2.0 2P
Interfaz de grupo A para motor sin codificadorInterfaz del motor PH2.0 2P
Interfaz del grupo B para motor sin codificadorAK09918C
Brújula electrónica de 3 ejesQMI8658C
Sensor de movimiento de 6 ejesTB6612FNG
Chip de control del motorCircuito de servocomando de bus serie
para controlar múltiples servos de bus serie ST3215 y obtener comentarios de servosRanura para tarjeta TF
Se puede utilizar para almacenar registros o configuraciones WIFI.encabezado GPIO de 40 pines
Para conectarse con Raspberry Pi u otras placas hostConector extendido de 40 pines
Fácil de usar los pines GPIO de Raspberry Pi u otras placas hostCP-2102
UART a USB, para transmisión de datos por radarCP-2102
UART a USB, para comunicación ESP32Circuito de descarga automática
Para cargar programas al ESP32 sin presionar los botones EN y BOOT
Admite expansión de funciones


DOF
4
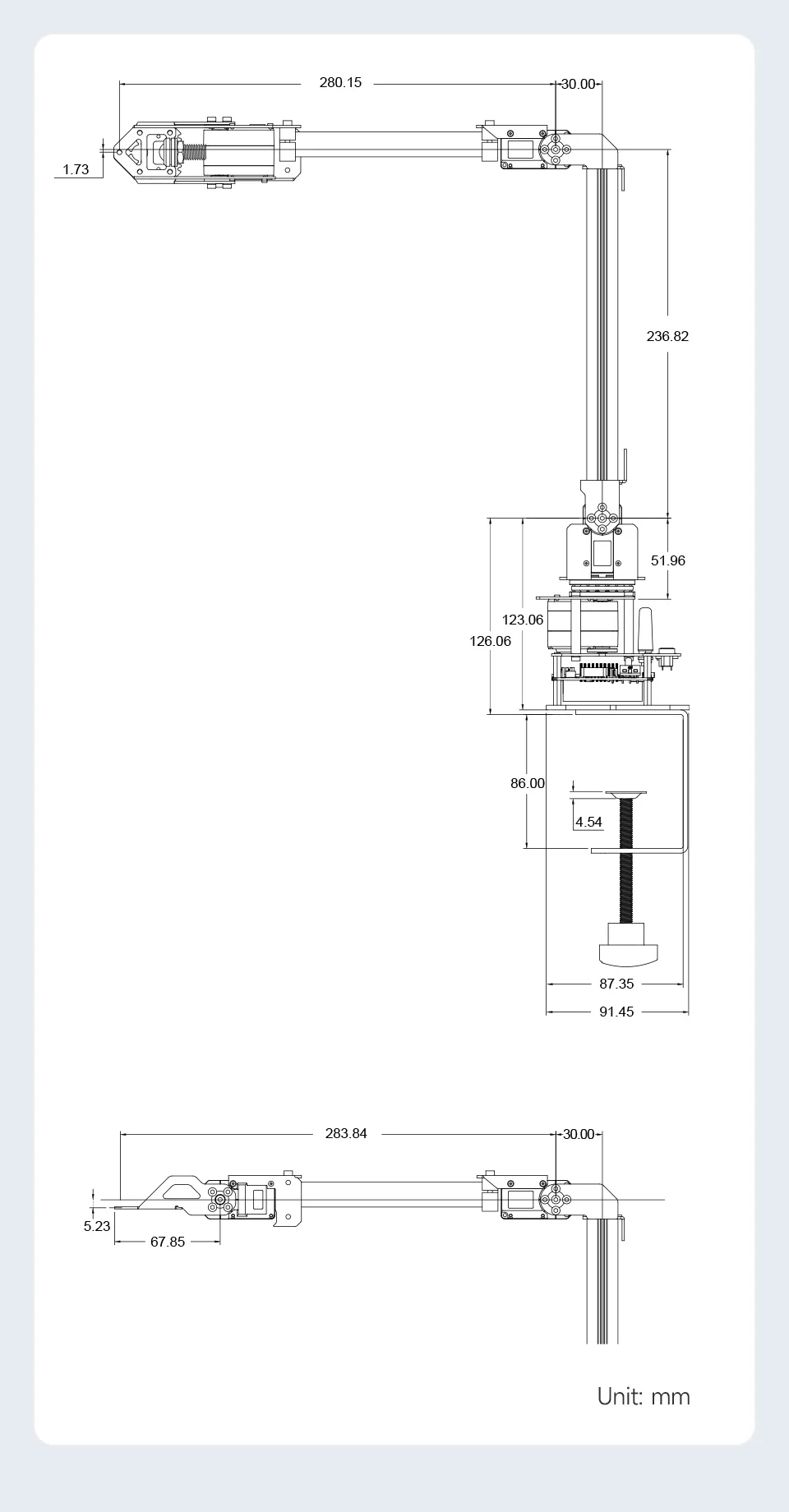
ESPACIO DE TRABAJO
Diámetro horizontal: 1090 mm (máx., 360° omnidireccional), Vertical: 798 mm (máx.)
Tensión de OPERACIÓN
Fuente de alimentación de 12V 5A, admite baterías de litio 3S (NO incluidas)
CAPACIDAD DE CARGA
0,5 kg a 0,5 m
PRECISIÓN DE REPOSICIÓN
≈±4 mm (bajo la misma carga)
VELOCIDAD DE ROTACIÓN DEL SERVO
40 rpm (sin carga, sin límite de torque)
RANGO DE OPERACIÓN
BASE-360°, BOMBRO-180°, ELBOW-180°, MAN-135°/270°
TIPO DE DRIVOS
Servo de bus serie TTL, junta de accionamiento directo
NÚMEROS DE SERVO
5
SENSOR DE ÁNGULO DE ARTICULACIÓN
12 bits 360° codificador magnético
TORQUE DE SERVO
30KG.CM a 12V
INFORMACIÓN DE COMENTARIOS DE LAS ARTICULACIONES
estado del servo, ángulo de unión, velocidad de rotación, carga de unión, voltaje del servo, corriente del servo, temperatura del servo y modo de trabajo del servo.
CONTROL PRINCIPAL
ESP32-WROOM-32
CARACTERÍSTICAS DEL MÓDULO DE CONTROL PRINCIPAL
WiFi, BT, doble núcleo, 240MHz
MODO DE CONTROL INALÁMBRICO
2,4G-WiFi, ESP-NOW
MODO DE CONTROL CON CABLEADO
USB, UART
MODO DE OPERACIÓN MANUAL
Interfaz de control WEB
MODO DE OPERACIÓN DEL HOGAR
Comunicación UART/USB/ESP-NOW*/HTTP a través de comandos de formato de datos JSON (* no admite la obtención de información de retroalimentación si se utiliza comunicación ESP-NOW)
SOPORTE PARA HOST
Dispositivos de conexión USB que incluyen Raspberry Pi, Jetson Orin Nano y PC.
FUNCIÓN EOAT
Función de abrazadera de forma predeterminada, se puede cambiar como un grado adicional de libertad
ENERGÍA LED
≤1,5W
TAMAÑO DE PANTALLA OLED
0,91 pulgadas
OTRAS FUNCIONES
Interruptor de alimentación de 2 canales y 12 V, IMU de 9 DOF
PESO DE BRAZO ROBÓGICO
826 ±15 g (sin incluir la abrazadera de fijación del borde de la mesa)
PESO DE MESA DE FIJACIÓN DEL BORDE DE MESA
286 ± 10g
ESPESOR DE BORDE DE MESA SOPORTE DEL CLAMP
72 mm
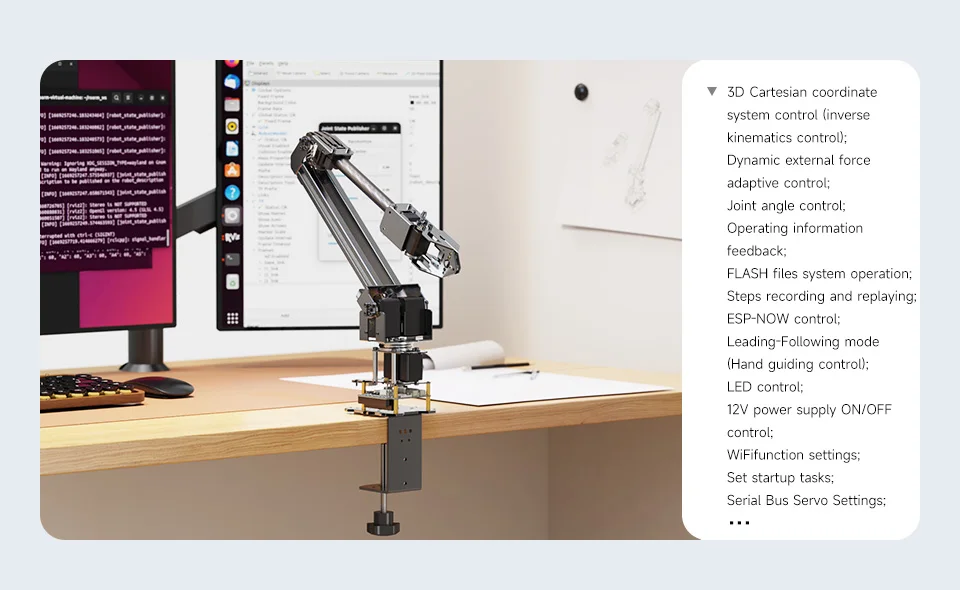
DEMO
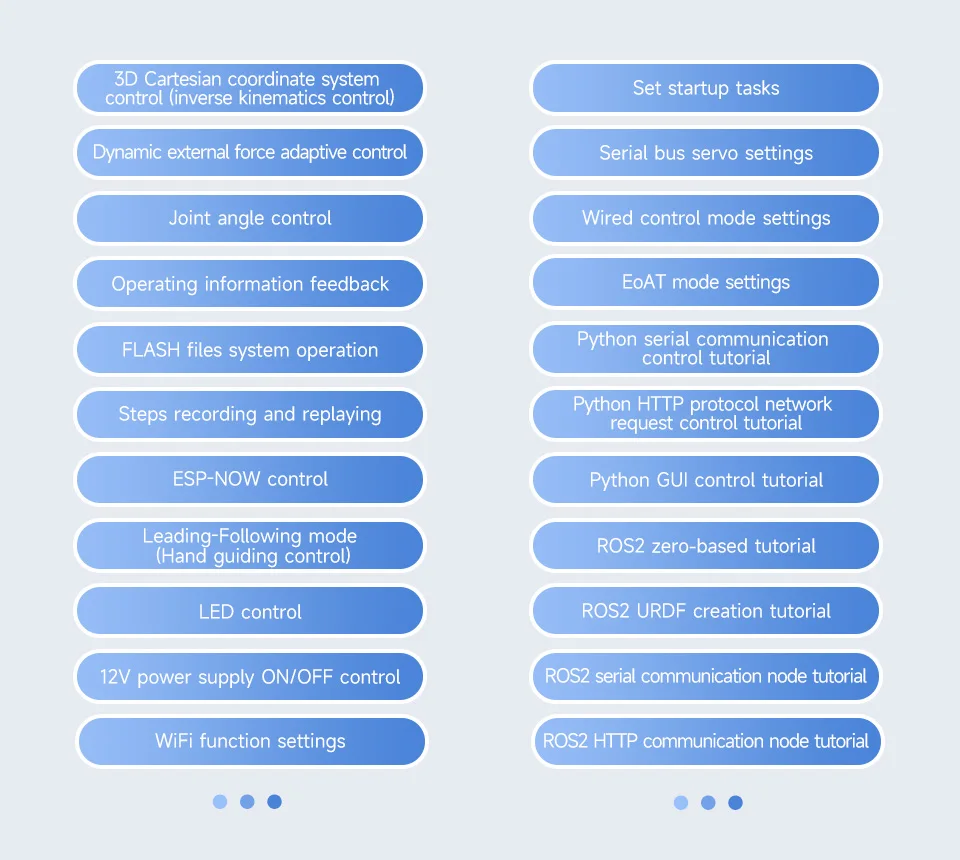
Control del sistema de coordenadas cartesianas 3D (control de cinemática inversa);Control dinámico de adaptación de fuerza externa;Control de ángulo conjunto;Comentarios sobre la información operativa;Operación del sistema de archivos FLASH;Grabación y reproducción de pasos;Control ESP-NOW;Modo de seguimiento principal (control de guía manual);Control LED;Control de encendido/apagado de fuente de alimentación de 12 V;Configuración de funciones WiFi;Establecer tareas de inicio;Configuración del servo del bus serie;Configuración del modo de retroalimentación;Configuración del modo EoAT, etc.(Nota: consulte WIKI para obtener más detalles)

* Los recursos para diferentes productos pueden variar; consulte la página wiki para confirmar los recursos realmente proporcionados.
CONTENIDO DEL PAQUETE
Peso:0,293 kg






