Descripción


Características
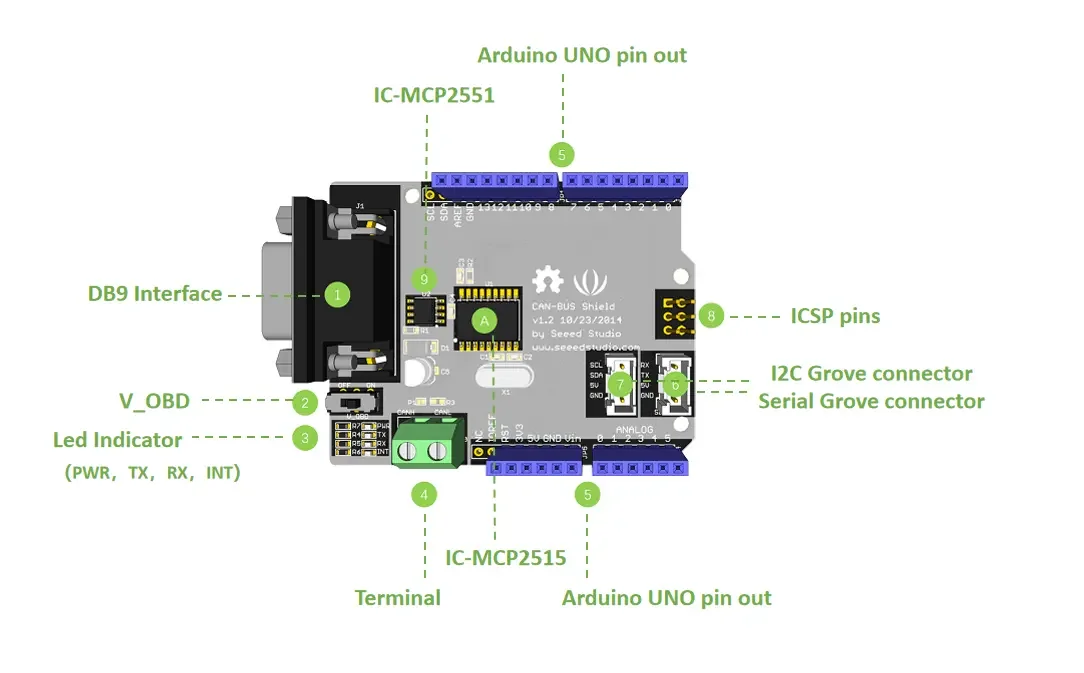
🌱IC de alto rendimiento: Controlador CAN-BUS MCP2515 independiente y transceptor CAN MCP2551 de alta velocidad
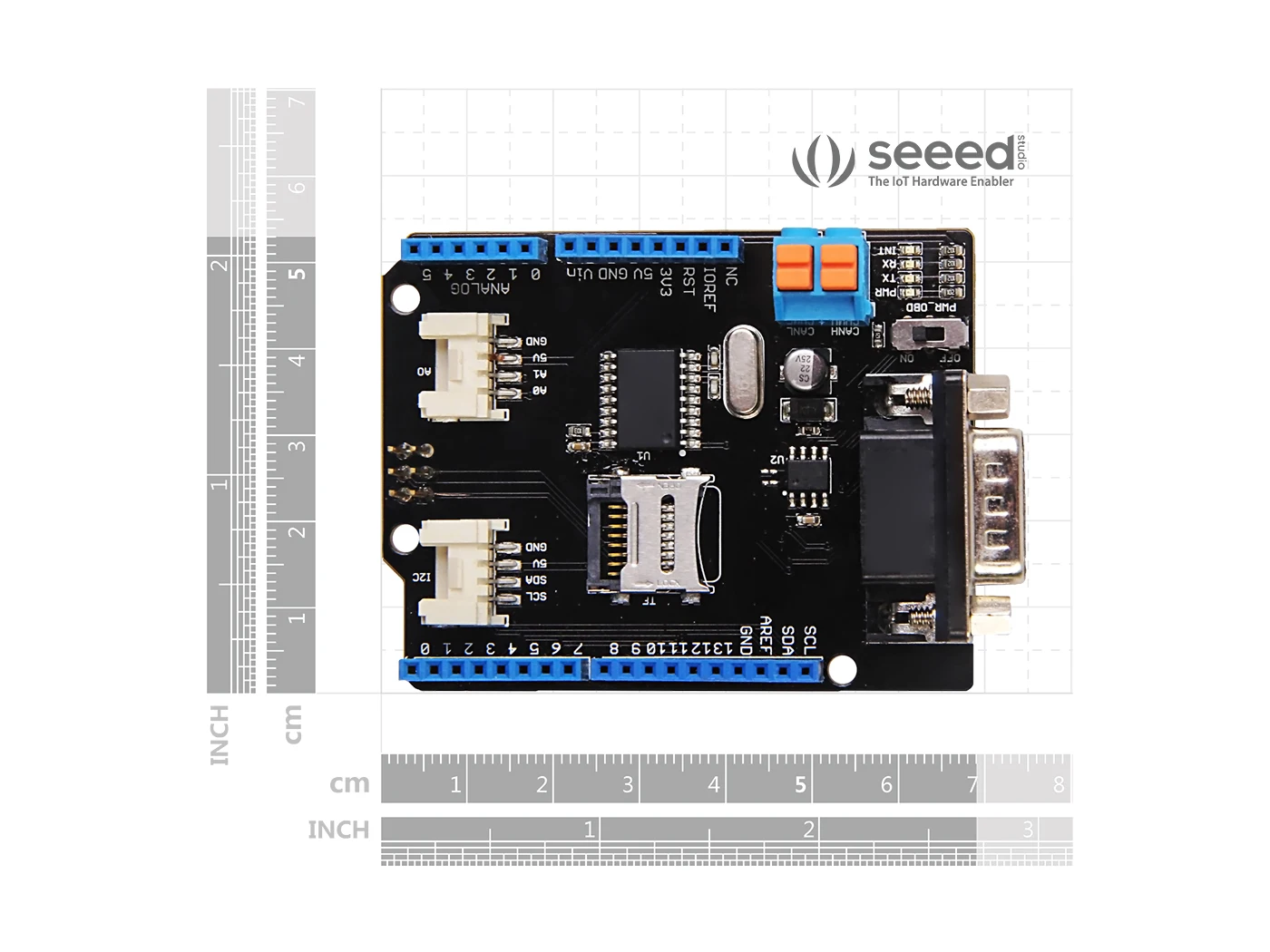
🌱Compatible con estándares industriales: proporciona un conector sub-D de 9 pines
🌱Velocidad de comunicación media: implementa CAN V2.0B hasta 1 Mb/s
🌱Larga distancia de viaje: datos estándar (11 bits) y extendidos (29 bits) y Marcos remotos
🌱Dos búferes de recepción con almacenamiento de mensajes priorizados
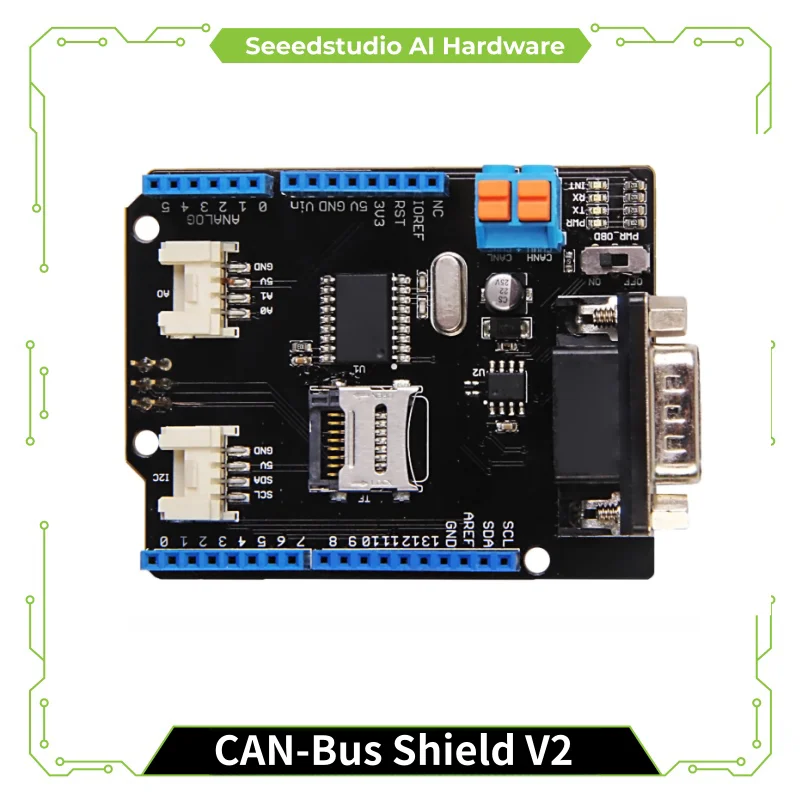
Descripción
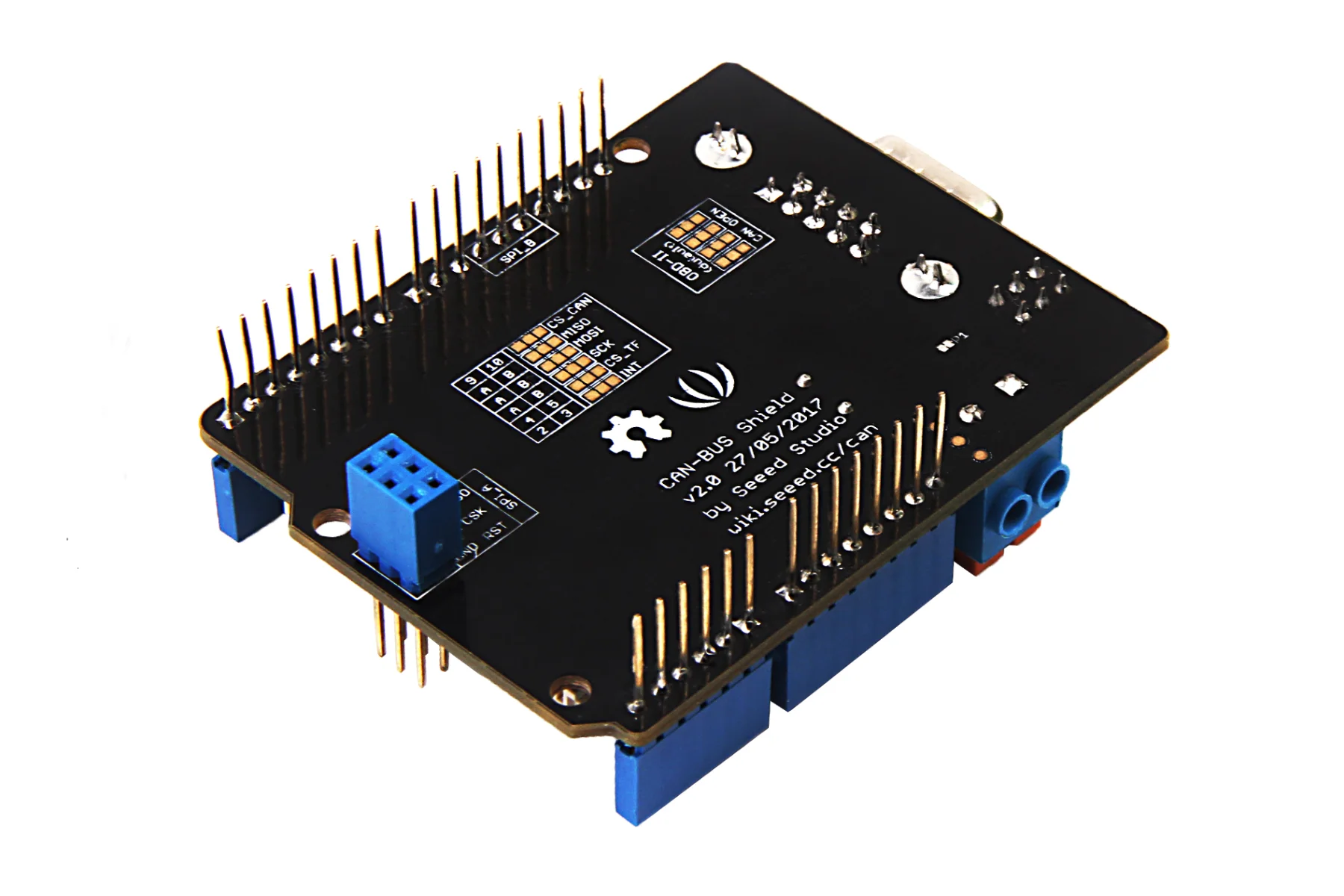
¡Hackear vehículos es fácil con CAN BUS y Arduino! Escudo CAN-BUS que adopta el controlador CAN-BUS MCP2515 con interfaz SPI y transceptor CAN MCP2551 para brindarle la capacidad CAN-BUS de Arduino/Seeeduino. Con la ayuda de CAN-BUS Shield, puede interactuar fácilmente con su automóvil mediante el uso de placas Arduino.
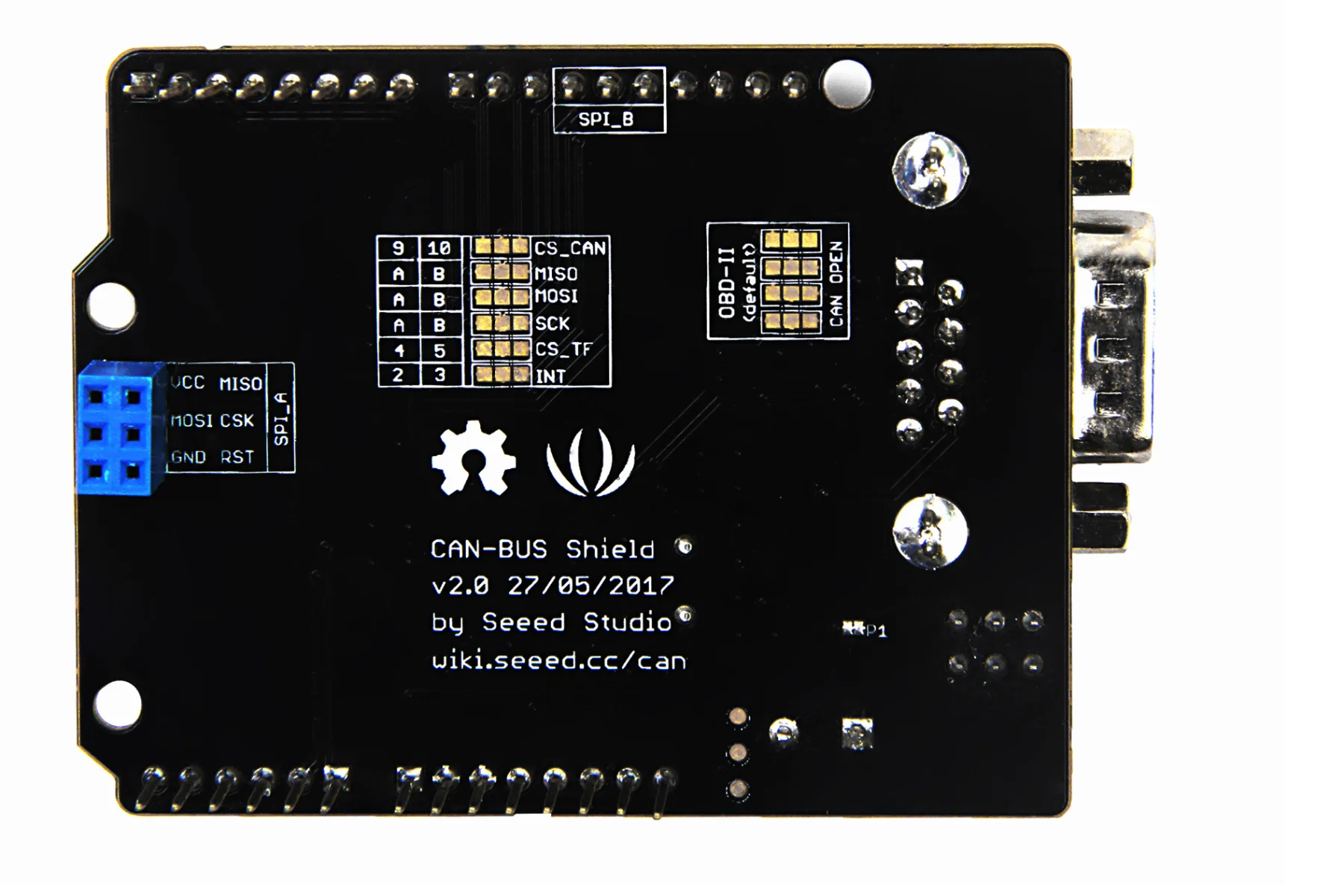
CAN-BUS Shield V2 también proporciona un pinout estándar CAN y de la red de transmisión, PIN CS intercambiable para la ranura de la tarjeta TF y PIN INT. Un terminal de tornillo puede conectar fácilmente CAN_H y CAN_L.
¿Qué es CAN-BUS?
CAN-BUS es un bus industrial común debido a su larga distancia de viaje, velocidad de comunicación media y alta confiabilidad. Se encuentra comúnmente en máquinas herramientas modernas y como un bus de diagnóstico automotriz.
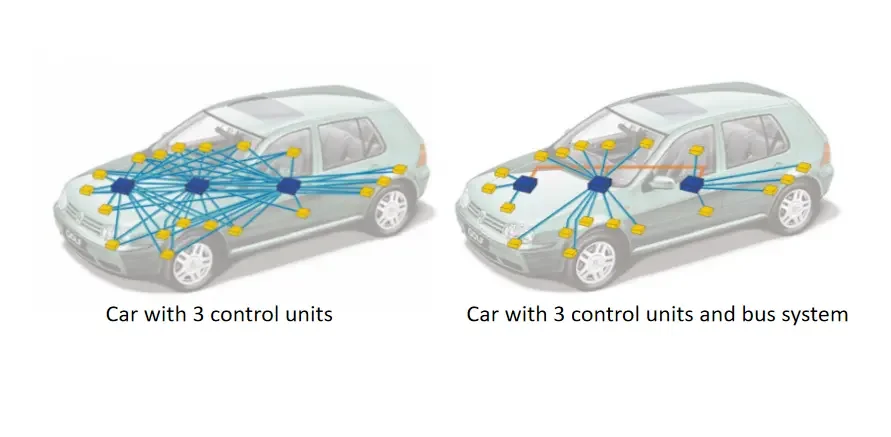
CAN significa Controller Area Network, se utiliza para permitir que los microcontroladores y dispositivos se comuniquen entre sí dentro de un vehículo sin una computadora host que permita el control y la adquisición de datos. Estos dispositivos también se denominan unidades de control electrónico (ECU) y permiten la comunicación entre todas las partes de un vehículo.
Hoy en día, puede encontrar hasta 70 ECU en un automóvil moderno. CAN es un bus de comunicación en serie diseñado para aplicaciones industriales y automotrices. Por ejemplo, se encuentran en vehículos, equipos agrícolas, entornos industriales, etc.
¿Cómo funciona CAN-BUS?
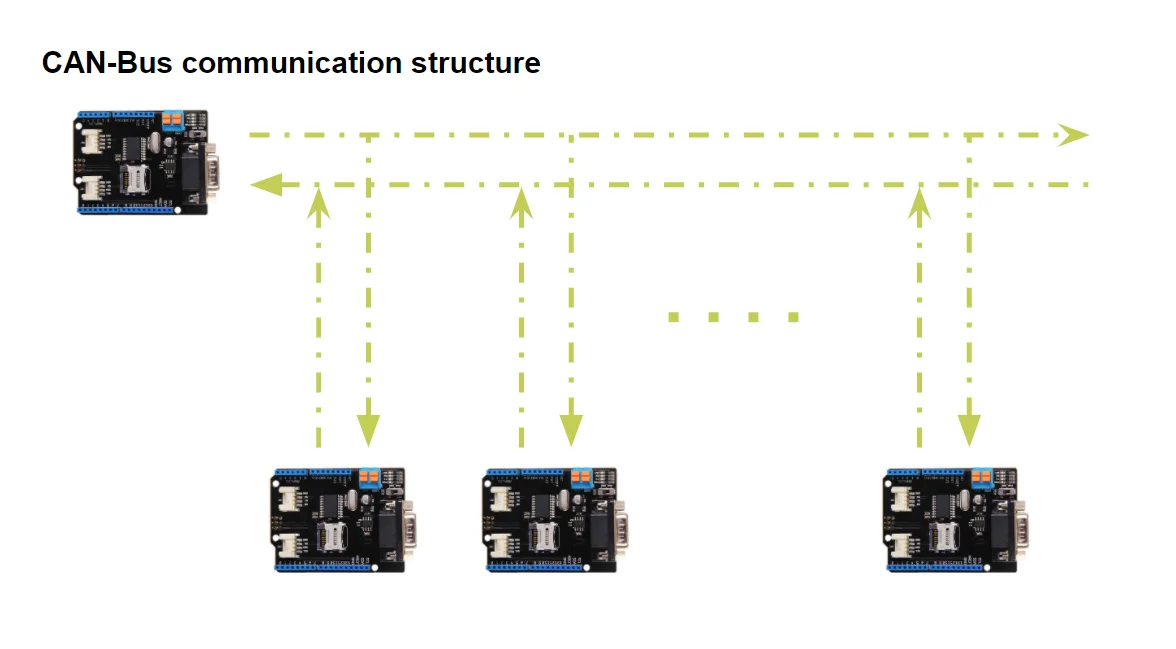
El nivel de combustible, los sensores de la puerta, el odómetro y muchas más partes de un automóvil tienen que comunicarse entre sí de alguna manera, y CAN BUS es lo que solían hacer. Estos componentes compatibles con CAN, que se llaman "nodos", están conectados con un cable de cobre de 3 cuerdas, sin un enrutador central para controlar el flujo de datos. Cada nodo puede escuchar los mensajes de cualquier otro nodo.
Cada nodo tiene un ID, donde los que tienen el ID de mayor prioridad pueden tener la prioridad de "hablar" primero mientras los demás "escuchan". Esto es para garantizar que nunca haya dos nodos hablando al mismo tiempo. El mayor beneficio de CAN-BUS es poder conectar componentes sin tener que preocuparse por el enrutamiento de la señal.
Más información sobre CAN-BUS aquí.
Lista de piezas
Escudo CAN-BUS V2 1