



Bundle (Pack)
Descripción
El Pixhawk® 6C es la última actualización para la familia exitosa de Pixhawk® controladores de vuelo, basados en Pixhawk® FMUv6C Estándar abierto y Estándar de conector.Viene con piloto automático PX4® preinstalado.Dentro del Pixhawk® 6C, puedes encontrar un STMicroelectronics® basado en STM32H743, combinado con tecnología de sensores de Bosch® & InvenSense®, brindándole flexibilidad y confiabilidad para controlar cualquier vehículo autónomo, adecuado tanto para aplicaciones académicas como comerciales.
El Pixhawk® El microcontrolador H7 de 6C contiene el brazo® Cortex®-El núcleo M7 funciona hasta 480 MHz, tiene 2 MB de memoria flash y 1 MB de RAM.Gracias al poder de procesamiento actualizado, los desarrolladores pueden ser más productivos y eficientes con su trabajo de desarrollo, permitiendo algoritmos y modelos complejos.El estándar abierto FMUv6C incluye IMU de alto rendimiento y bajo ruido a bordo, diseñadas para ser rentables y al mismo tiempo tener redundancia de IMU.Un sistema de aislamiento de vibraciones para filtrar las vibraciones de alta frecuencia y reducir el ruido para garantizar lecturas precisas, lo que permite a los vehículos alcanzar un mejor rendimiento general de vuelo.El Pixhawk® 6C es perfecto para desarrolladores de laboratorios de investigación corporativa, startups, académicos (investigación, profesores, estudiantes) y aplicaciones comerciales.
Esta es la opción de caja de plástico de menor costo.Otra opción que ofrecemos tiene un estuche con acabado CNC de aluminio que se puede comprar. .
Puntos clave de diseño:
Procesador H7 de alto rendimiento con velocidad de reloj de hasta 480 MHz
Nuevo diseño rentable con factor de forma de bajo perfil
Unidad de medida inercial (IMU) redundante de Bosch® & InvenSense®
Sistema de aislamiento de vibración integrado de nuevo diseño para filtrar la vibración de alta frecuencia y reducir el ruido para garantizar lecturas precisas
Las IMU están controladas por temperaturas mediante resistencias de calefacción integradas, lo que permite una temperatura de trabajo óptima de las IMU
Para información técnica, visite.
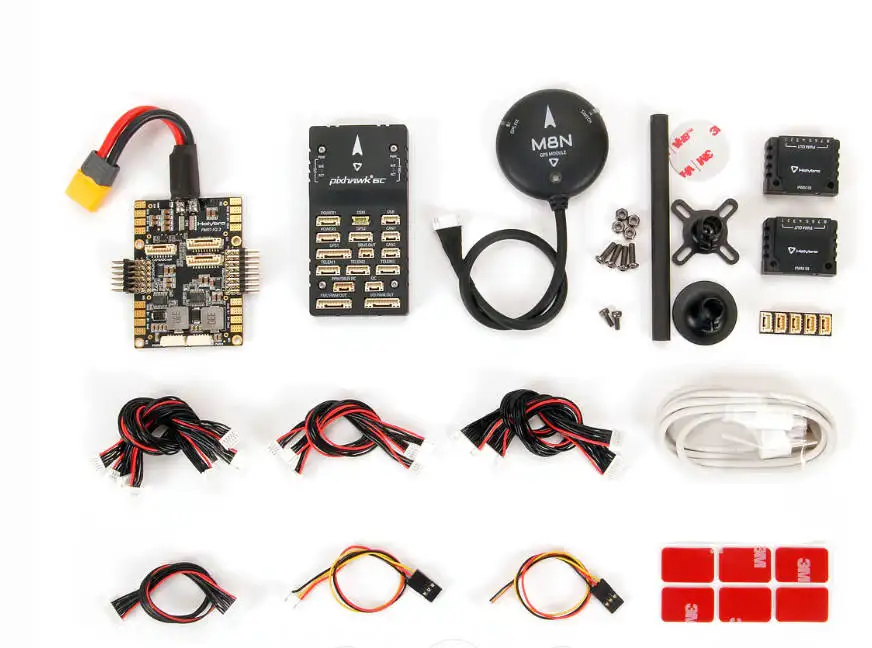
SKU20179/20181/20183/20185Incluye:
Controlador de vuelo Pixhawk 6C
o
SKU20180/20182/20184/20186Incluye:
Controlador de vuelo Pixhawk 6C
o





