



En Stock
89,99 €
Con la garantía de 
Bundle (Pack)
3 unidades vendidas
Última actualización: 2026-01-29T23:35:56.572Z
Descripción
Descripción de productos
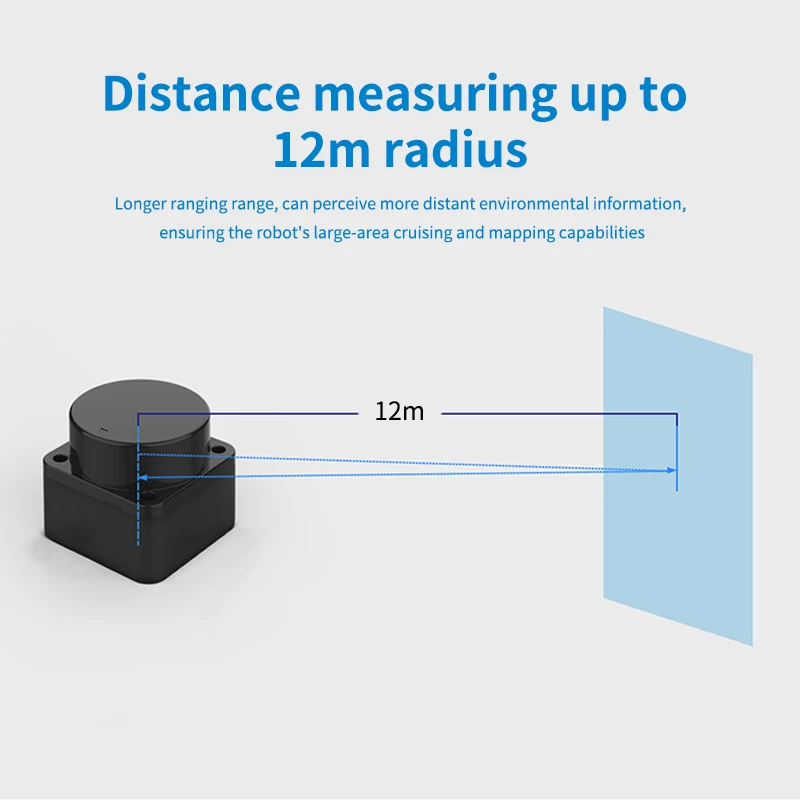
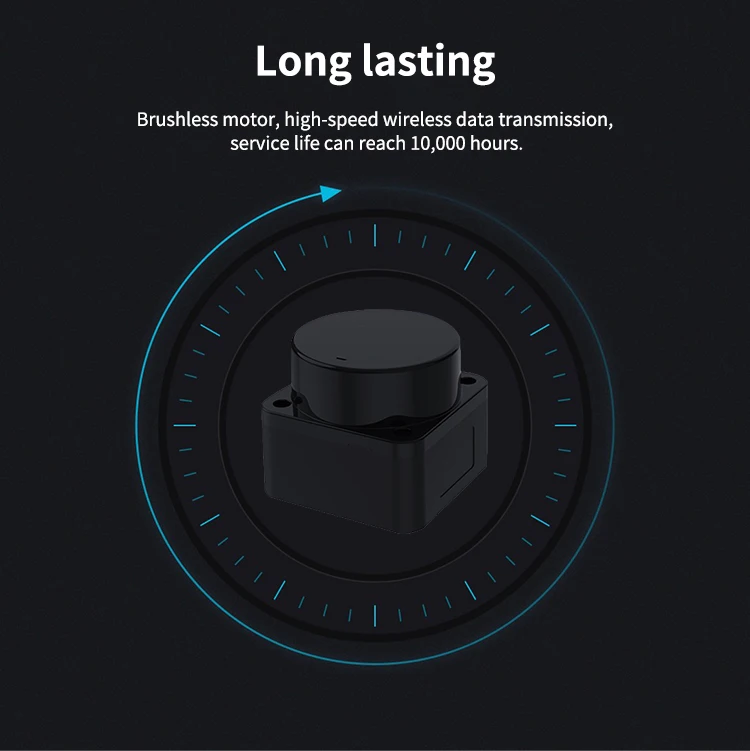
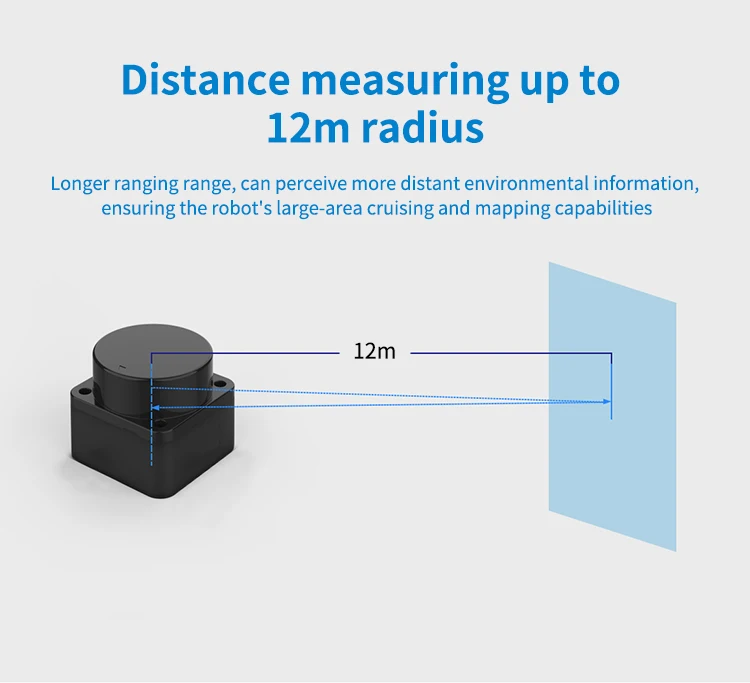
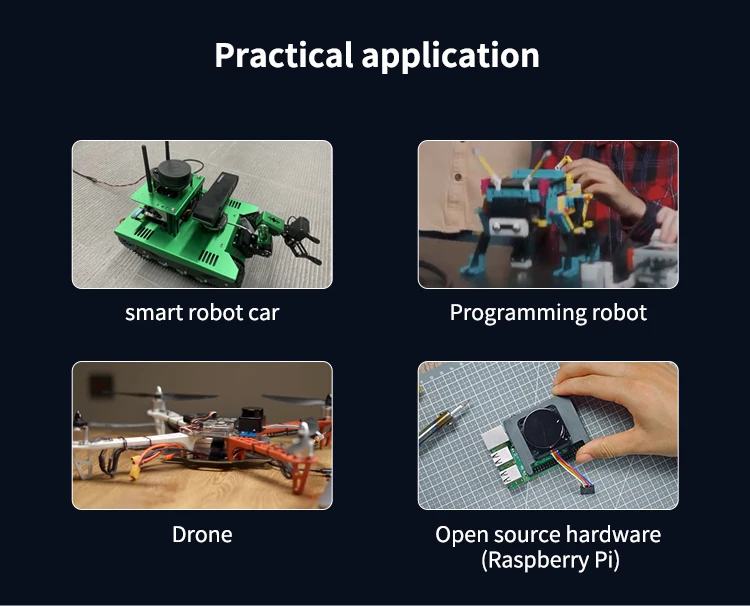
Kit de escáner de sensor láser DTOF portátil LD06 Lidar de 360 grados con rango de 12m para robot ROSLD06 se compone principalmente de núcleo de alcance láser, Unidad de transmisión inalámbrica, unidad de comunicación inalámbrica, unidad de medición de ángulo, unidad de accionamiento del motor y carcasa mecánica. El núcleo de rango LD06 adopta la tecnología DTOF para medir 4500 veces por segundo. Cuando funciona, LD06 emite el láser infrarrojo hacia adelante, el láser se refleja en la unidad receptora de fotones individuales después de encontrar el objeto objetivo. Por lo tanto, obtenemos tanto el tiempo de emisión como de recepción del láser, el espacio entre ellos es el tiempo de vuelo. Con la velocidad de la luz, podemos calcular la distancia. Después de recibir los datos de distancia, LD06 los combinará con el valor de Ángel que obtiene de la unidad de medición de ángulo para comprender los datos de nube de puntos, luego transmitirá los datos de nube de puntos a la interfaz externa a través de la comunicación inalámbrica. Mientras tanto, la interfaz externa proporciona PWM para permitir que la unidad de accionamiento del motor accione el motor. Después de que la unidad de control externo obtenga la velocidad de rotación, alcanzará la velocidad especificada a través del control de bucle cerrado del algoritmo PID para garantizar que LD06 funcione de manera estable.
Característica
* 12m de radio de medición* 30000Lux resistencia a la luz fuerte
* Frecuencia de medición 4500HZ
* Rango de escaneo de 360 °
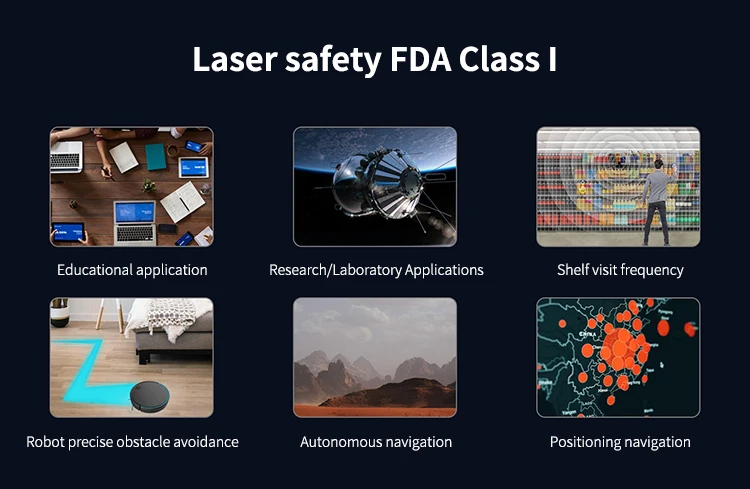
* Seguridad del láser (FDA Clase I)
* (TOF) Rango de tiempo de vuelo
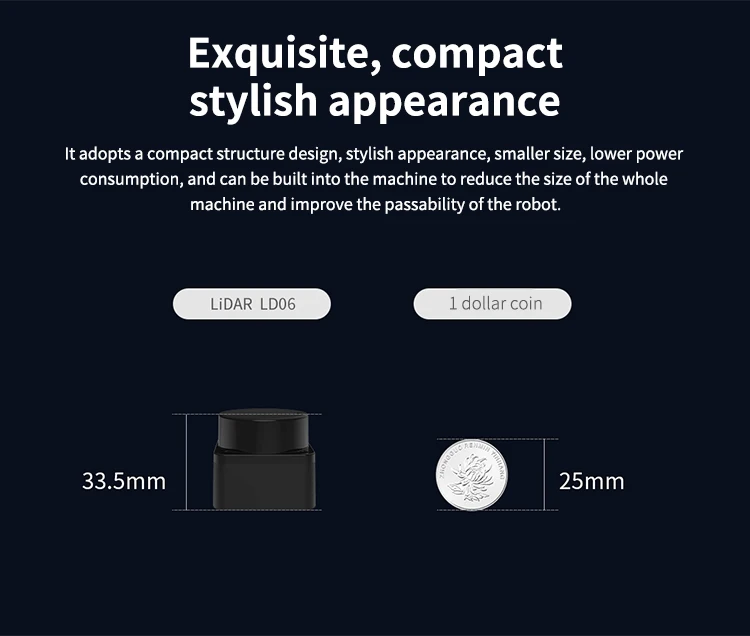
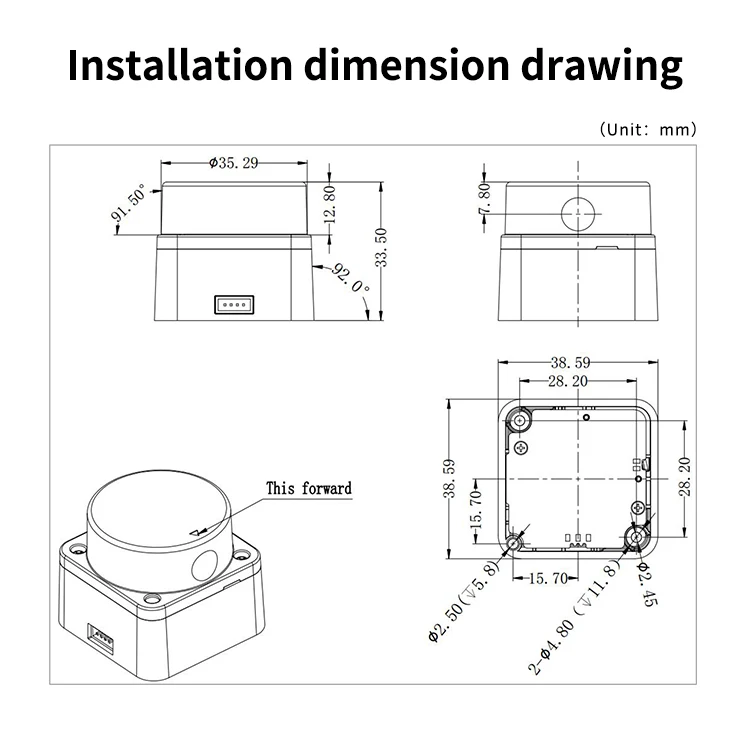
* Tamaño pequeño, fácil de instalar
* Vida útil de 10000H
Detalles del producto










Contacte con nosotros
Persona de contacto: Lizzy WangWhatsApp: + 86 18372755804
Dirección de correo electrónico:
Dirección: East 2nd Floor, Minlida Industry Masion Block B, Liuxian Avenue No.1189, Nanshan, Shenzhen, Guangdong, China





