





Análisis de Experto
Experto verificado
Análisis general del producto
Llevo más de quince años probando controladores para motores paso a paso en proyectos de fresado CNC, impresión 3D y robótica. El TB6600 es un driver que conozco bien porque ha sido durante años una de las opciones más accesibles para quien Monta máquinas CNC de escritorio o actualiza impresoras 3D sin querer gastar una fortuna en drivers profesionales.
Mi experiencia con este controlador abarca varias semanas de uso intensivo con motores Nema 17 en una Prusa MK3s modificada, un Nema 23 en un router CNC artesanal y pruebas puntuales con un Nema 34 para un proyecto de posicionamiento. He configurado micropasos desde 1/1 hasta 1/32, ajustado corrientes entre 1.5A y 3.5A, y lo he sometido a sesiones prolongadas de mecanizado para evaluar su comportamiento térmico.
El veredicto tras estas pruebas es claro: el TB6600 cumple su promesa de ser una solución económica y funcional para proyectos maker y small business. No es un driver de gama alta, pero su relación precio-rendimiento es difícil de batir en este segmento.
Calidad de construcción y materiales
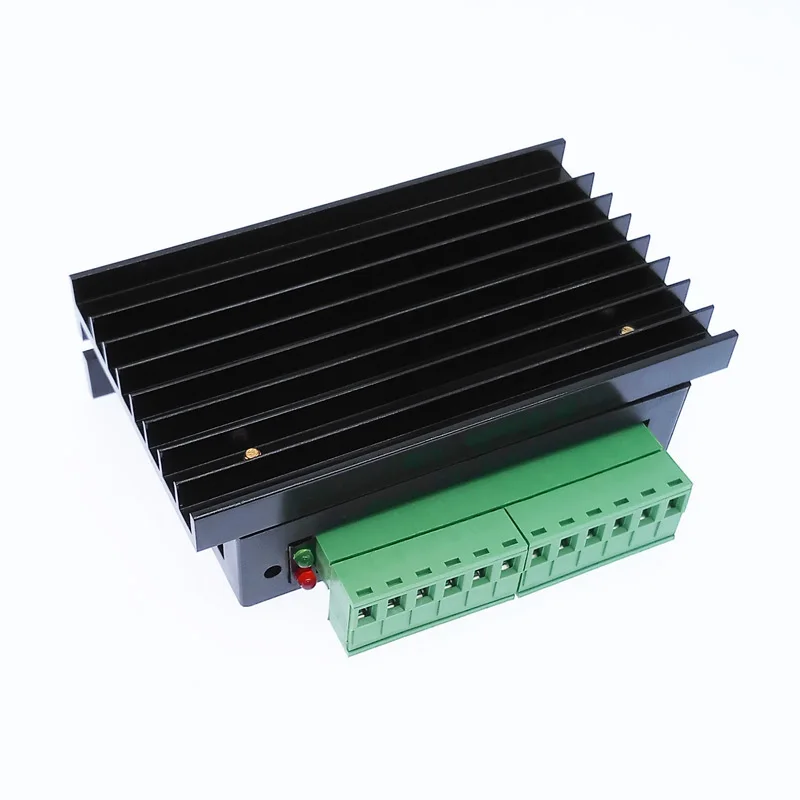
La placa base del TB6600 usa componentes discretos montados sobre un PCB verde estándar de grado industrial. Los puentes H del chip Toshiba TB6600 están protegidos por un disipador de aluminio atornillado que, en condiciones de laboratorio a 25°C, mantiene temperaturas operativas dentro de parámetros seguros hasta aproximadamente 3.5A por fase con micropasos altos.
Los conectores de terminales de tornillo son robustos y aceptan cables de hasta 1.5mm² sin problemas. He tenido que reapretar algunos después de varias semanas de vibración en la máquina CNC, algo habitual en este tipo de configuraciones. Los jumpers de configuración para micropasos y corriente usan estándar de 2.54mm y responden bien, aunque el potenciómetro de ajuste de corriente tiene cierta holgura que é calibrate con multímetro para precisión.
El chipset TB6600 original soporta frecuencia de hasta 100kHz, suficiente para la mayoría de aplicaciones où el límite real lo pone el microcontrolador que genera los pulsos. En mis pruebas con una Raspberry Pi Pico a 50kHz no hubo pérdidas de pasos detectables.
Compatibilidad y rendimiento
La compatibilidad con motores Nema es amplia, pero con matices importantes. Con Nema 17 a 1.5A el driver funciona frío y preciso, ideal para impresoras 3D. Con Nema 23 a 3A el rendimiento sigue siendo bueno siempre que el montaje mecánico esté bien ejecutado y no haya resonancias excessivas.
Aquí viene el primer aviso importante: el TB6600 no es undriver de corriente constante con chopper inteligente. Su control de corriente es básico, lo que significa que el par puede caer a velocidades altas si la tensión de alimentación es baja. Mi recomendación es usar al menos 24Vdc para aplicaciones que requieran velocidad, ya que con 12V el motor pierde par drásticamente a más de 300 RPM.
Los 32 micropasos configurables son su punto fuerte. En modo 1/32 con un motor de 200 pasos por revolución efectivo, la resolución teórica es de 6400 pasos por revolución. En la práctica, esto se traduce en movimiento visibly más suave y menor riesgo de resonancia. Para fresado CNC el modo 1/16 es un buen compromiso; para impresión 3D el 1/32 mejora el acabado pero ralentiza la comunicación gcode.
La compatibilidad con Arduino, ESP32 y Raspberry Pi está verificada. El Eingang de lógica a 3.3V funciona sin level shifters, aunque en entornos con ruido eléctrico puede haber falsos pasos. Mi configuración stable usa optoaislamiento en las señales de paso y dirección.
Puntos fuertes y aspectos mejorables
Entre los puntos fuertes deste controlador destaco la relación calidad-precio insuperable para proyectos maker. El chip TB6600 es conocido y estable, con documentación abundante. Las protecciones contra sobrecorriente y sobrecalentamiento funcionan, y el LED de diagnóstico es útil para troubleshoot básico.
El rango de tensión 9-42Vdc ofrece flexibilidad. Una fuente de 24V/5A cubrirá la mayoría de configuraciones con motores hasta Nema 23. Para Nema 34 o superiores, el límite de 4A se queda corto y conviene buscar alternativas con mayor capacidad de corriente.
Los aspectos mejorables son los esperados em esta gama. El potenciómetro de corriente tiene drift térmico: después de una hora a plena, el ajuste puede variar 50-100mA. Recomento verificar con amperímetro después del warm-up para aplicaciones de precisión. El disipador incluido es justo para 3A continuo; para 4A es imprescindible añadir ventilación forzada.
La ausencia de protecciones contra cortocircuito en las salidas del motor es otro punto débil. Un corto en el cableado del motor puede dañar el driver irreversiblemente. Recomiendo doble revisión del cableado antes de energizar y, si es posible, fusible en línea con cada fase del motor.
Veredicto del experto
El TB6600 es una opción sólida para quien inicia en CNC o busca actualizar impresoras 3D sin complicateces. Cumple lo básico con fiabilidad aceptable y precio competitivo.
Recomiendo este driver para impresoras 3D de escritorio, routers CNC de tamaño medio, máquinas de corte láser y sistemas de posicionamiento automatizado. No es adecuado para aplicaciones industriales de alta precisión o continuo a plena carga con motores de más de 3A.
Para obtener el mejor rendimiento, usa fuente de alimentación de 24Vdc, configura micropastos según la aplicación (1/16 para fresado, 1/32 para impresión), añade disipador activo si superas 2.5A por fase, y verifica la corriente con multímetro después del calentamiento inicial.
Con los ajustes correctos y mantenimiento básico, este controlador seguirá funcionando durante años en proyectos donde no se requiera la precisión de drivers profesionales costing diez veces más.





