En Stock
2,34 €
Con la garantía de 
11 unidades vendidas
Última actualización: 2026-03-04T01:23:37.567Z
Descripción


Características:
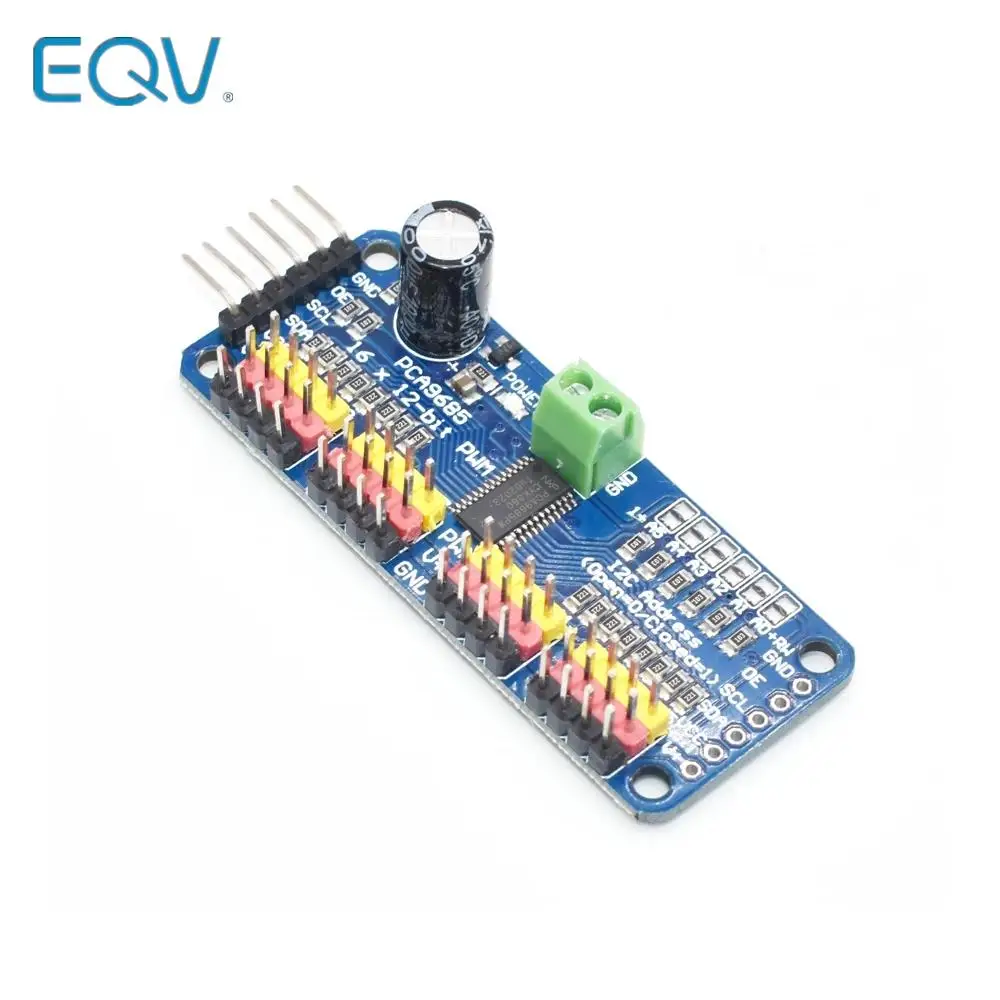
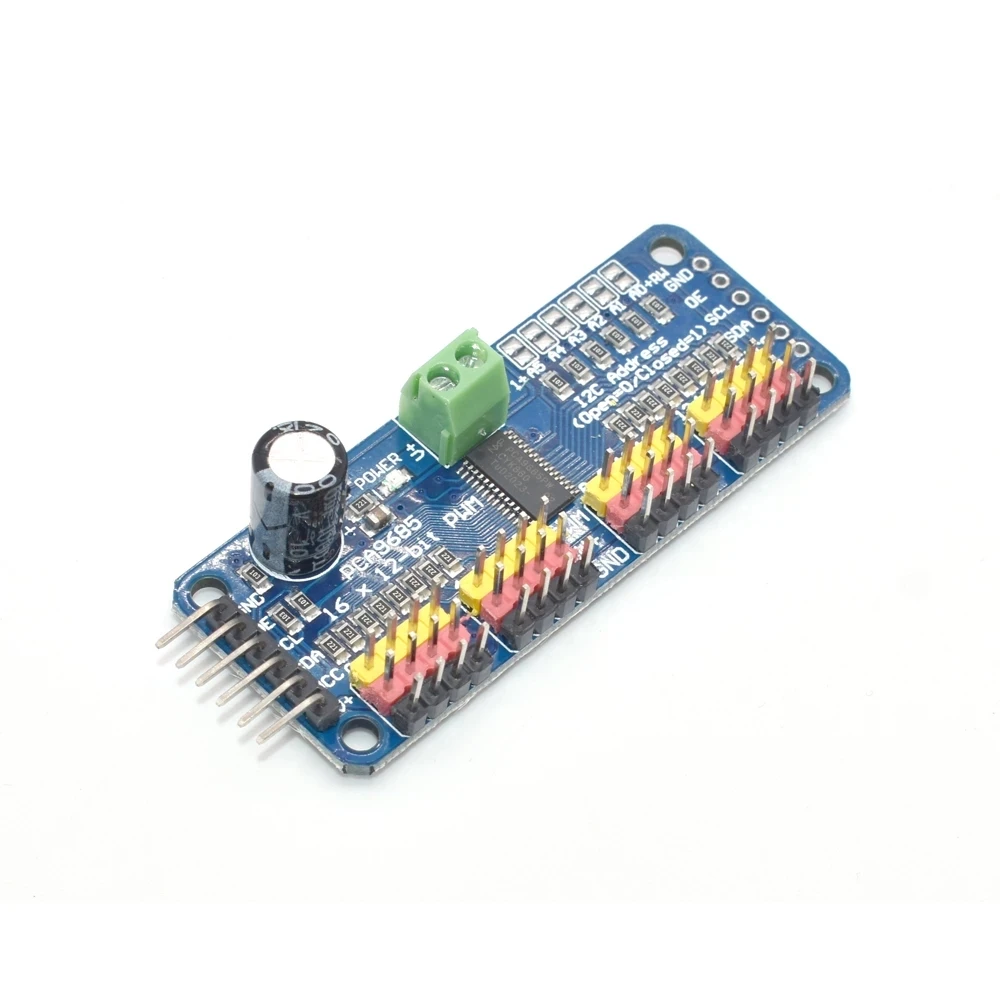
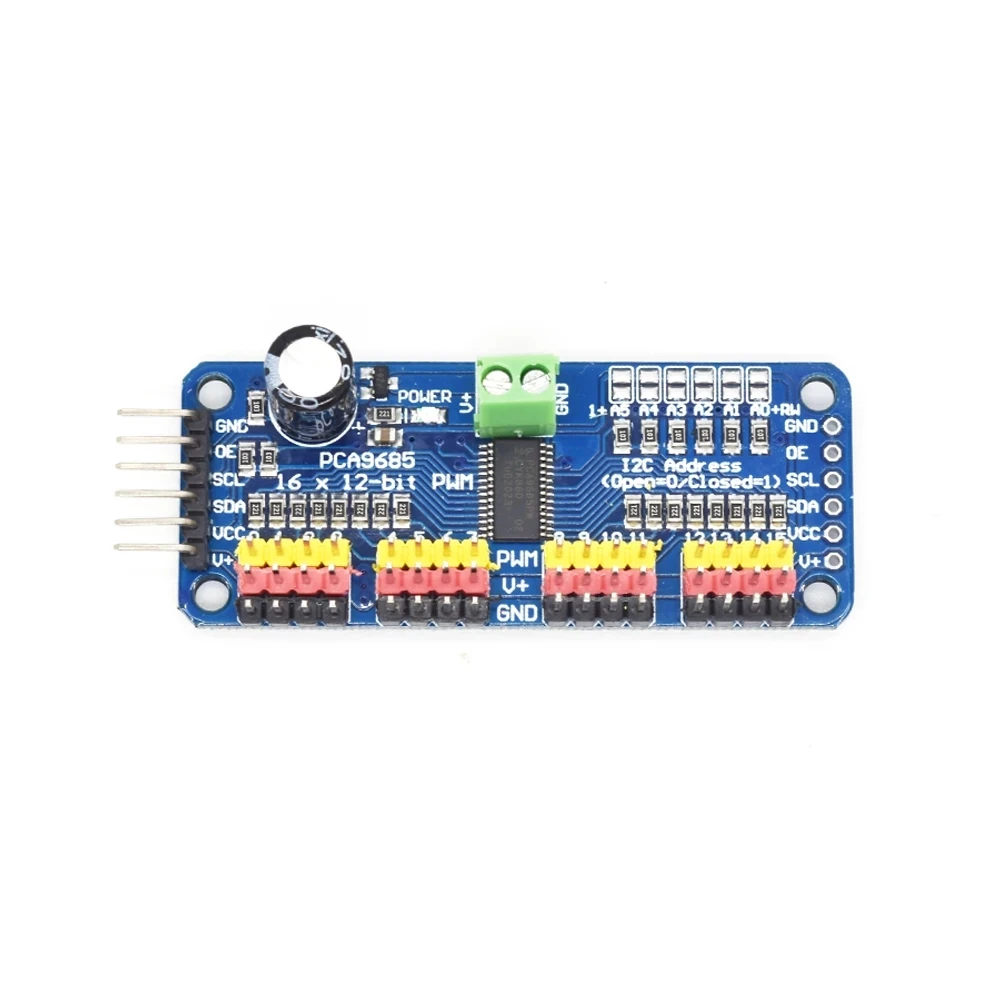
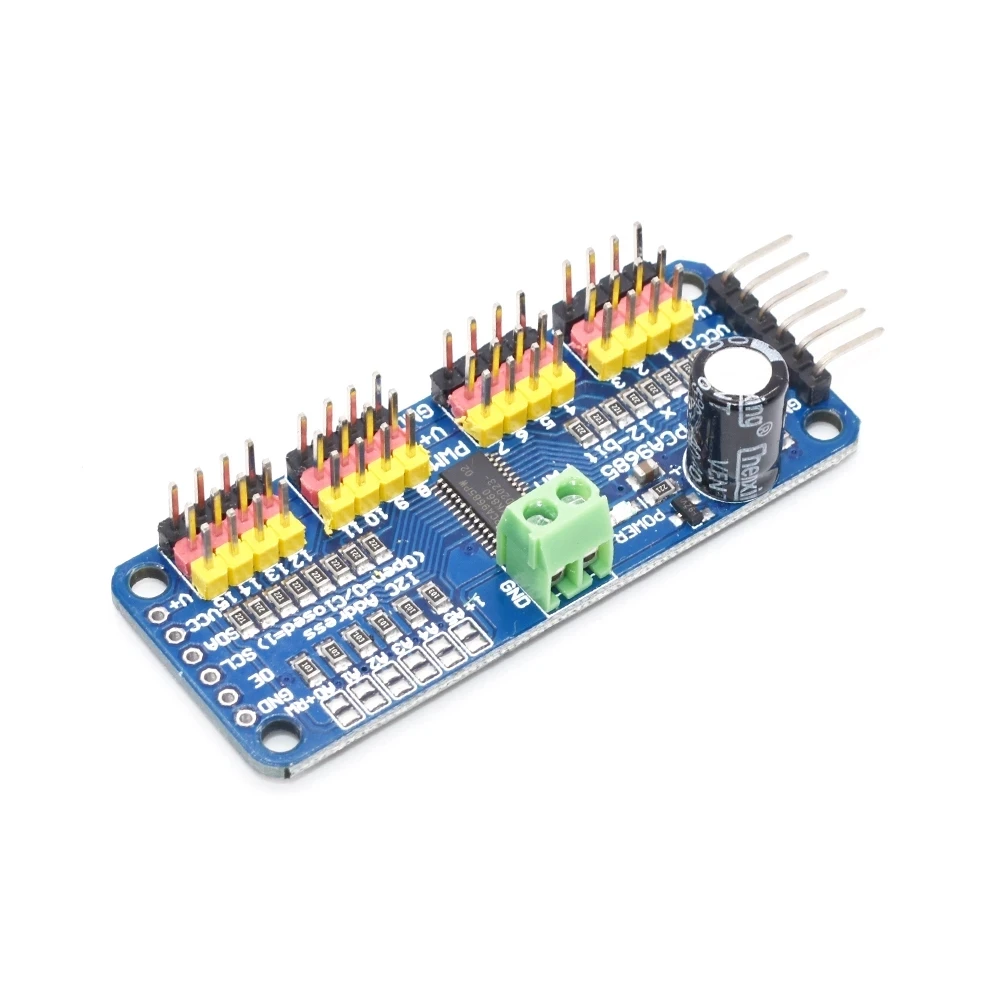
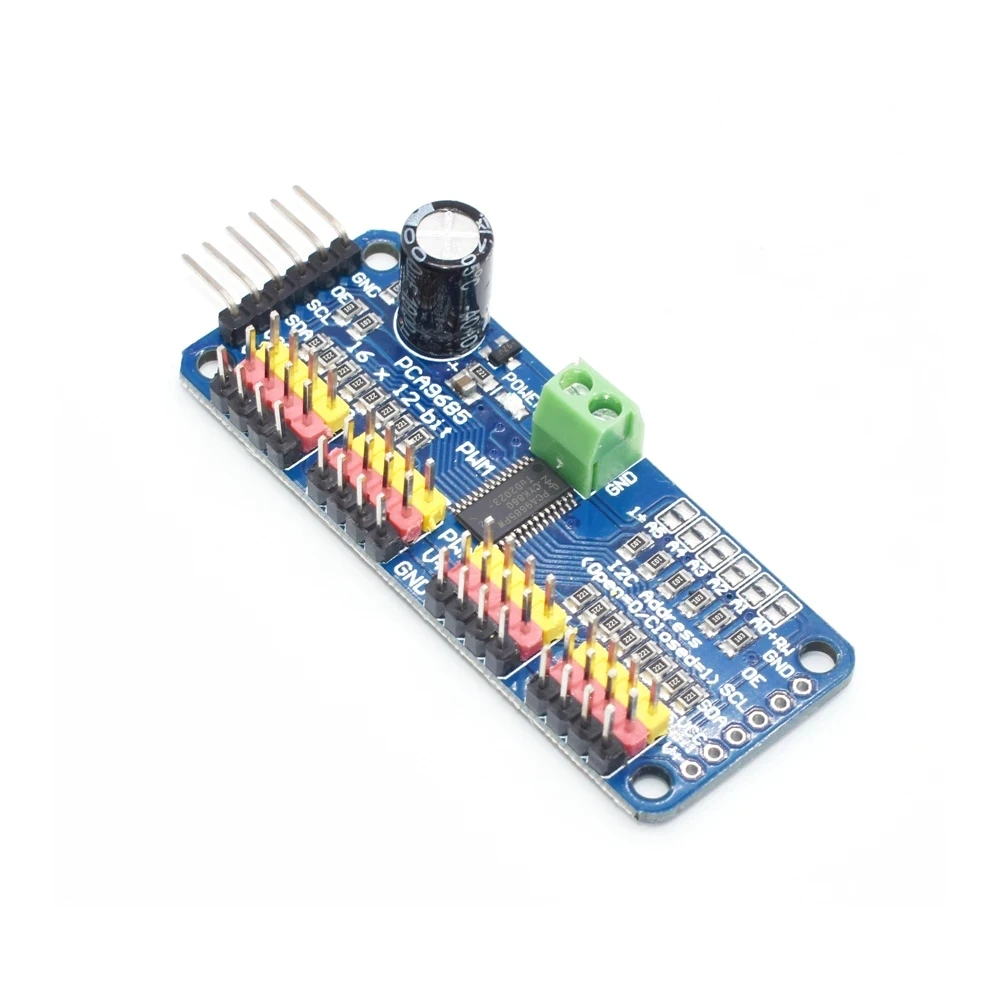
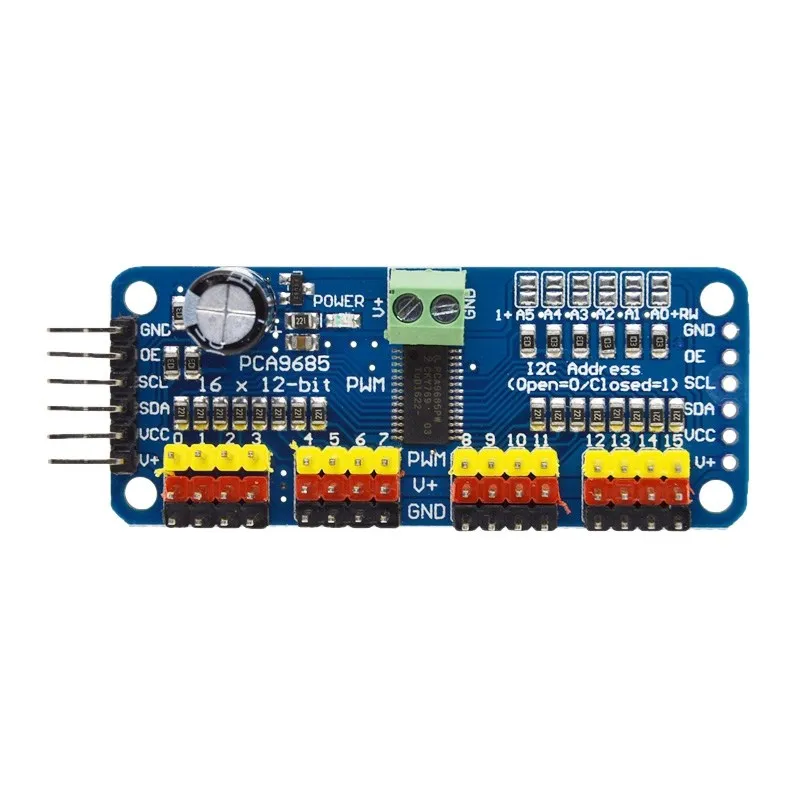
Dimensiones (sin cabezales ni bloque de terminales) 2,5 "x 1" x 0,1 "(62,5mm x 25,4mm x 3mm)Peso (sin cabezales ni bloque de terminales): 5,5 gramosPeso (con cabezales 3x4 y bloque de terminales): 9 gramosEsta placa/chip utiliza una dirección I2C de 7 bits entre 0-0x60x80, seleccionable con puentesBloque de terminales para la entrada de energía (o puede usar las conexiones de 0,1 "en el lateral)Protección de polaridad inversa en la entrada del bloque de terminalesEnergía verde-Buen LEDConectores de 3 pines en grupos de 4 para que pueda conectar 16 servos a la vez (los servoenchufes son ligeramente más anchos que 0,1 ", por lo que solo puede apilar 4 uno al lado del otro en el cabezal de 0,1"Diseño "encadenado"Un lugar para colocar un condensador grande en la línea V + (en caso de que lo necesite)Resistencias de la serie de 220 ohmios en todas las líneas de salida para protegerlas y hacer que los LED de conducción sean trivialesPuentes de soldadura para los 6 pines de selección de direcciónControlador PWM con reloj integrado, de la marca, de la marca. A diferencia de la familia TLC5940, no es necesario enviar continuamente señal de atar su microcontrolador, ¡su funcionamiento es completamente libre!Cumple con 5V, lo que significa que puede controlarlo desde un microcontrolador de 3,3 V y aún así conducir de forma segura hasta salidas de 6V (esto es bueno para cuando desea controlar LED blancos o azules con más de 3,4 voltajes de avance)6 pines de selección de dirección para que pueda cablear hasta 62 de estos en un solo bus I2C, un total de 992 salidas, es decir, muchos servos o LEDFrecuencia ajustable PWM hasta aproximadamente 1,6 KHzResolución de 12 bits para cada salida: para los servos, eso significa una resolución de aproximadamente 4us y una tasa de actualización de 60 Hz.Salida Push-Pull configurable o de drenaje abiertoLa salida habilita el PIN para desactivar rápidamente todas las salidasInstrucciones de uso
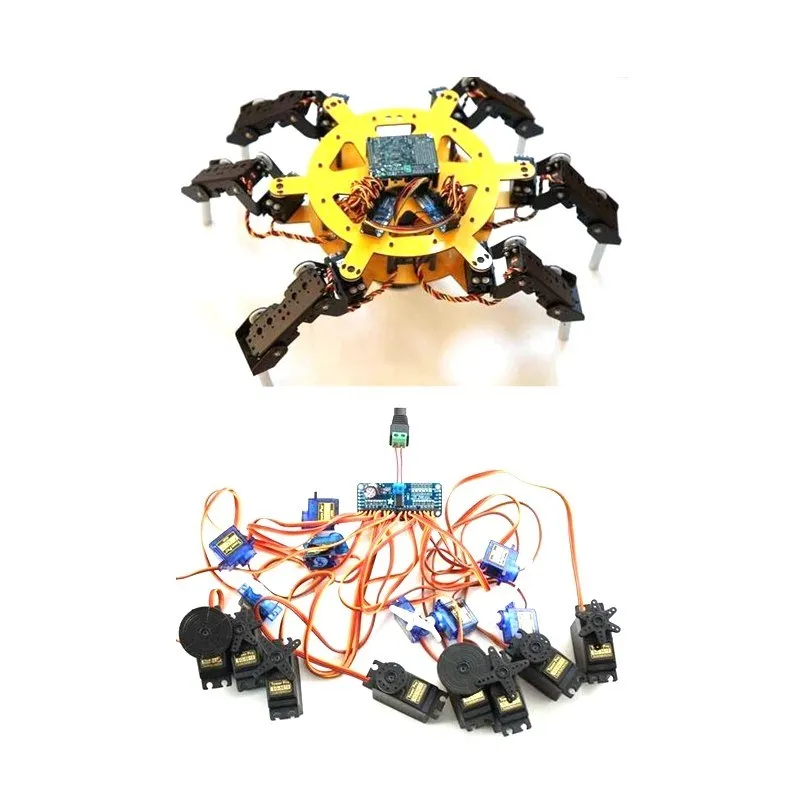
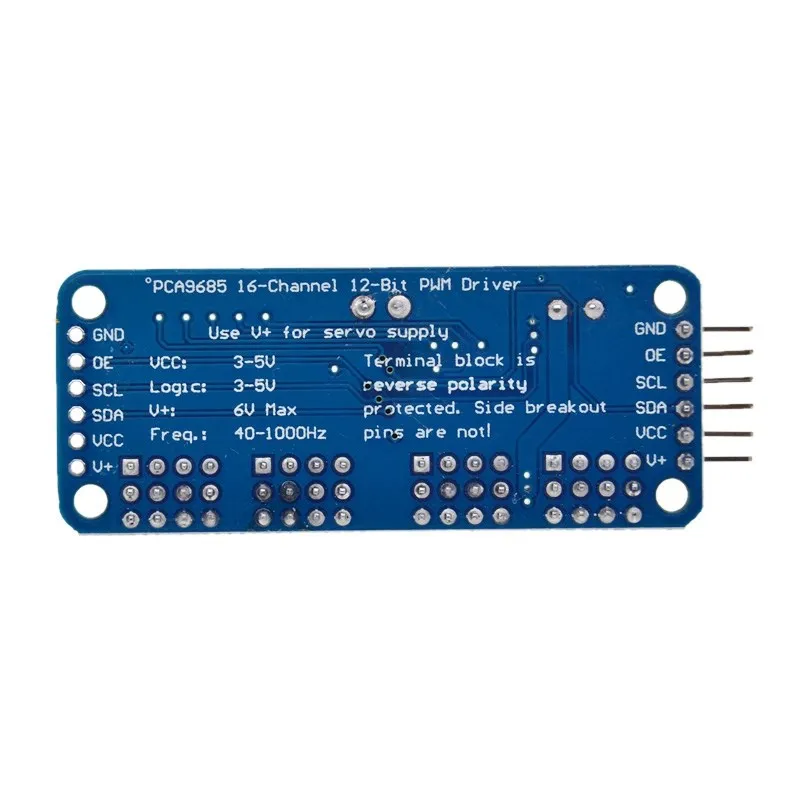
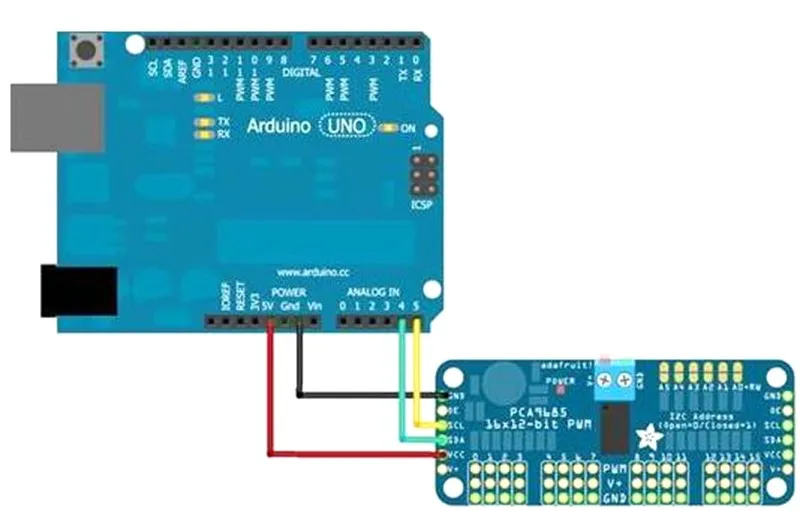 El pin VCC es solo para la fuente de alimentación del chip. Si desea conectar el servo o las luces LED, use la fuente de alimentación V + pin, V + pin admite fuente de alimentación de 3,3 ~ 6V (voltaje seguro de chip 5V). Se recomienda conectar la fuente de alimentación externa a través del terminal de la fuente de alimentación.(2) Parte de la fuente de alimentación:La mayor parte del voltaje de diseño del servo es de 5 ~ 6V, especialmente en varios engranajes de dirección que funcionan al mismo tiempo, con la necesidad de una fuente de alimentación de alta potencia. Si está utilizando directamente el PIN Arduino 5V para alimentar el servo directamente, hay algunos problemas impredecibles, por lo que le recomendamos que tenga una fuente de alimentación externa adecuada para la placa de accionamiento.
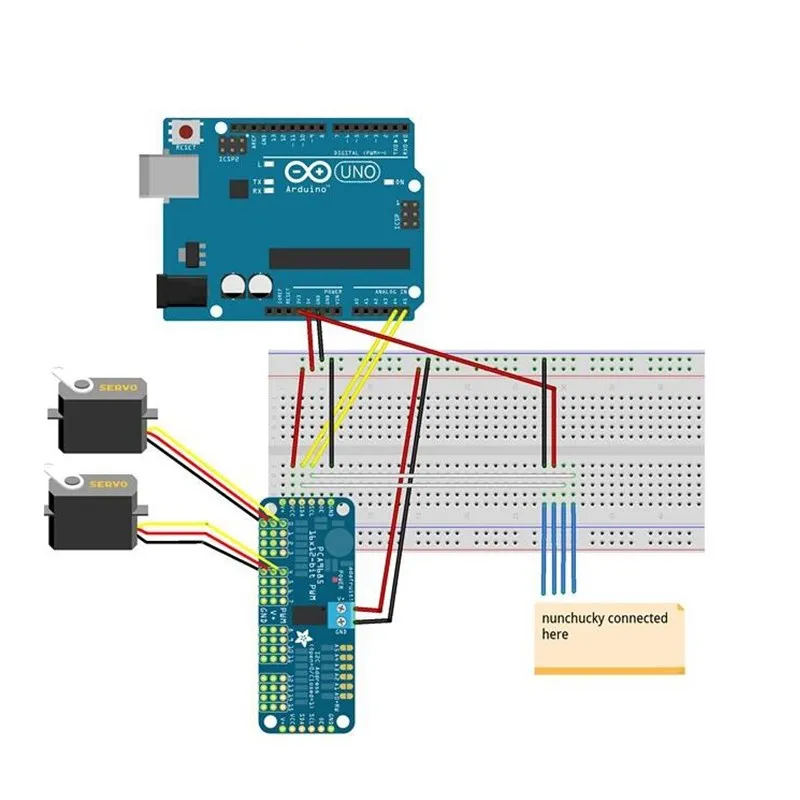
El pin VCC es solo para la fuente de alimentación del chip. Si desea conectar el servo o las luces LED, use la fuente de alimentación V + pin, V + pin admite fuente de alimentación de 3,3 ~ 6V (voltaje seguro de chip 5V). Se recomienda conectar la fuente de alimentación externa a través del terminal de la fuente de alimentación.(2) Parte de la fuente de alimentación:La mayor parte del voltaje de diseño del servo es de 5 ~ 6V, especialmente en varios engranajes de dirección que funcionan al mismo tiempo, con la necesidad de una fuente de alimentación de alta potencia. Si está utilizando directamente el PIN Arduino 5V para alimentar el servo directamente, hay algunos problemas impredecibles, por lo que le recomendamos que tenga una fuente de alimentación externa adecuada para la placa de accionamiento.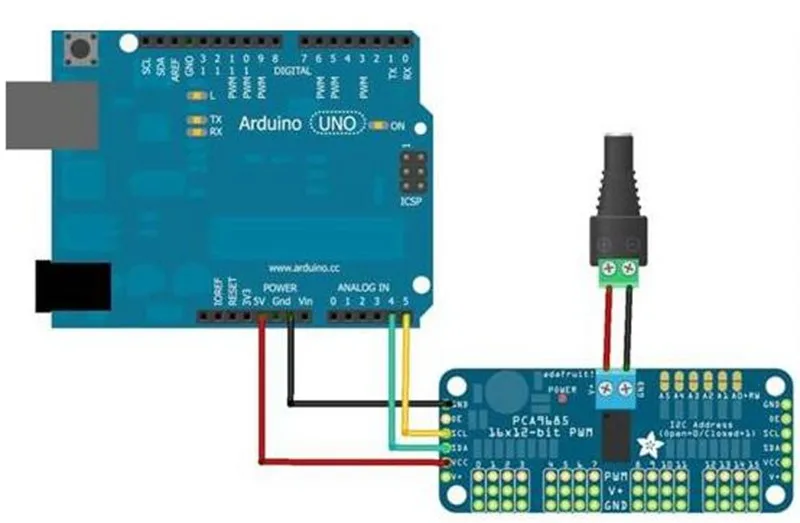 (3) Conecte el servo:La mayoría de los servos se conectan utilizando Enchufes hembra estándar de 3 cables, siempre que el PIN correspondiente esté en la placa del controlador. (El cable de tierra es generalmente negro o marrón, la línea de señal es generalmente amarilla o blanca)
(3) Conecte el servo:La mayoría de los servos se conectan utilizando Enchufes hembra estándar de 3 cables, siempre que el PIN correspondiente esté en la placa del controlador. (El cable de tierra es generalmente negro o marrón, la línea de señal es generalmente amarilla o blanca)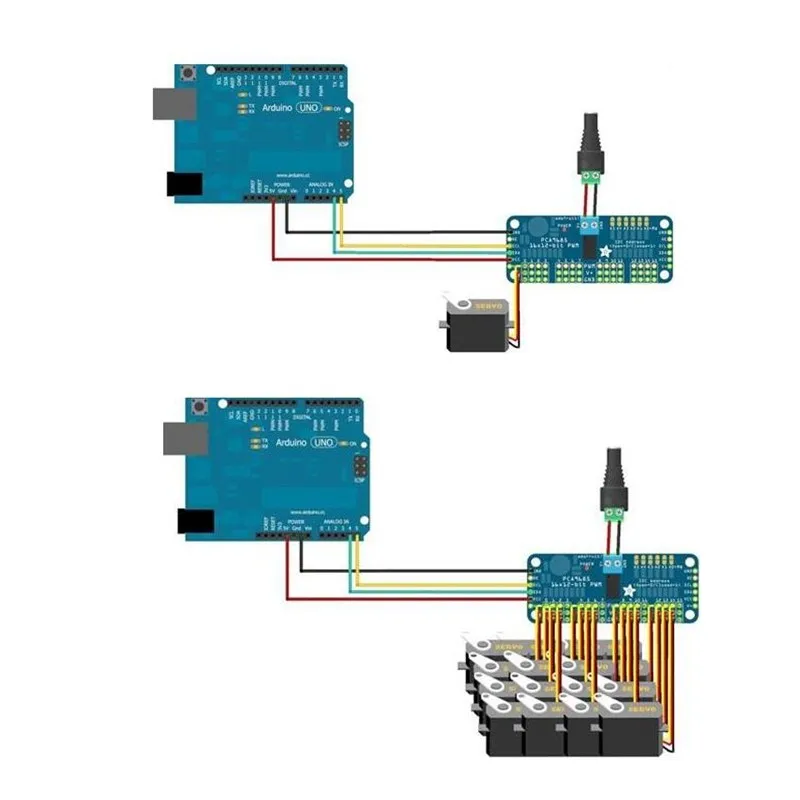 (4) Para la dirección asignada del tablero del conductor:Cada Placa de accionamiento de la cascada debe tener una dirección de acceso única. La dirección I2C inicial de cada placa de controlador es 0 × 40, puede modificar la esquina superior derecha de la dirección I2C del puente. Conecte un puente con soldadura para indicar un número binario "1".
(4) Para la dirección asignada del tablero del conductor:Cada Placa de accionamiento de la cascada debe tener una dirección de acceso única. La dirección I2C inicial de cada placa de controlador es 0 × 40, puede modificar la esquina superior derecha de la dirección I2C del puente. Conecte un puente con soldadura para indicar un número binario "1".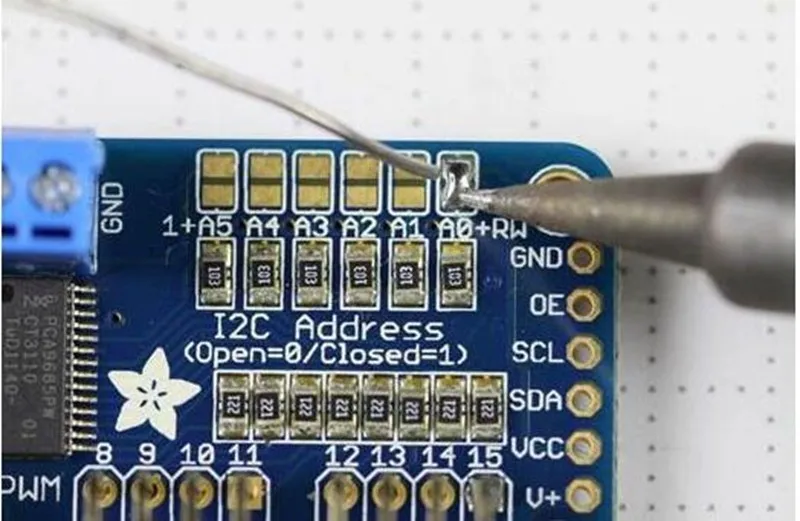 Tablero 0: Dirección=0x40Offset=binario 00000 (predeterminado)Placa 1: Dirección=0x41 Offset=binario 00001 (como se muestra arriba, conectado a A0)Tablero 2: Dirección=0x42 Offset=binario 00010 (Conectar a A1)Placa 3: Dirección=0x43 Offset=binario 00011 (conecte A0 y A1)Placa 4: Dirección=0x44 Offset=binario 00100 (Conectar a A2)Y así sucesivamente. . .Ejemplo de código:# Incluir Wire. H # Incluir Adafruit_PWMServoDriver.h Adafruit_PWMServoDriver pwm1=Adafruit_PWMServoDriver (0 × 40);Adafruit_PWMServoDriver pwm2=Adafruit_PWMServoDriver (0x41);Configuración nula () {Serie. inicio (9600);Serial.println ( "16 canales¡Prueba PWM! ");Pwm1.begin ();Pwm1.setPWMFreq (1600); //Esta es la frecuencia máxima PWMPwm2.begin ();Pwm2.setPWMFreq (1600); //Esta es la frecuencia máxima PWM
Tablero 0: Dirección=0x40Offset=binario 00000 (predeterminado)Placa 1: Dirección=0x41 Offset=binario 00001 (como se muestra arriba, conectado a A0)Tablero 2: Dirección=0x42 Offset=binario 00010 (Conectar a A1)Placa 3: Dirección=0x43 Offset=binario 00011 (conecte A0 y A1)Placa 4: Dirección=0x44 Offset=binario 00100 (Conectar a A2)Y así sucesivamente. . .Ejemplo de código:# Incluir Wire. H # Incluir Adafruit_PWMServoDriver.h Adafruit_PWMServoDriver pwm1=Adafruit_PWMServoDriver (0 × 40);Adafruit_PWMServoDriver pwm2=Adafruit_PWMServoDriver (0x41);Configuración nula () {Serie. inicio (9600);Serial.println ( "16 canales¡Prueba PWM! ");Pwm1.begin ();Pwm1.setPWMFreq (1600); //Esta es la frecuencia máxima PWMPwm2.begin ();Pwm2.setPWMFreq (1600); //Esta es la frecuencia máxima PWM
Opiniones de clientes
3 opinionesФ
6 de mayo de 2025
Soldadura, las pistas son perfectas, aún no hay forma de comprobarlo. Gracias
A
18 de agosto de 2025
P
25 de junio de 2025





