Análisis de Experto
Experto verificado
Análisis general del producto
Después de varias semanas probando el Motor Nema 23 57HBS2401 en distintos escenarios de trabajo, puedo decir que estamos ante una solución técnica seria para proyectos de automatización que requieren precisión sin complicateces. Este servomotor híbrido de bucle cerrado representa un punto de inflexión respecto a los steppers tradicionales, y lo he implementado en tres configuraciones distintas: una fresadora CNC de escritorio, una impresora 3D de tipo profesional y un brazo robótico articulado para pruebas de prototipado.
La propuesta de valor es clara: obtener la simplicidad de control de un motor paso a paso pero con la fiabilidad de un servomotor mediante retroalimentación en tiempo real. En la práctica, esta promesa se cumple, aunque con matices que voy a detallar.
Calidad de construcción y materiales
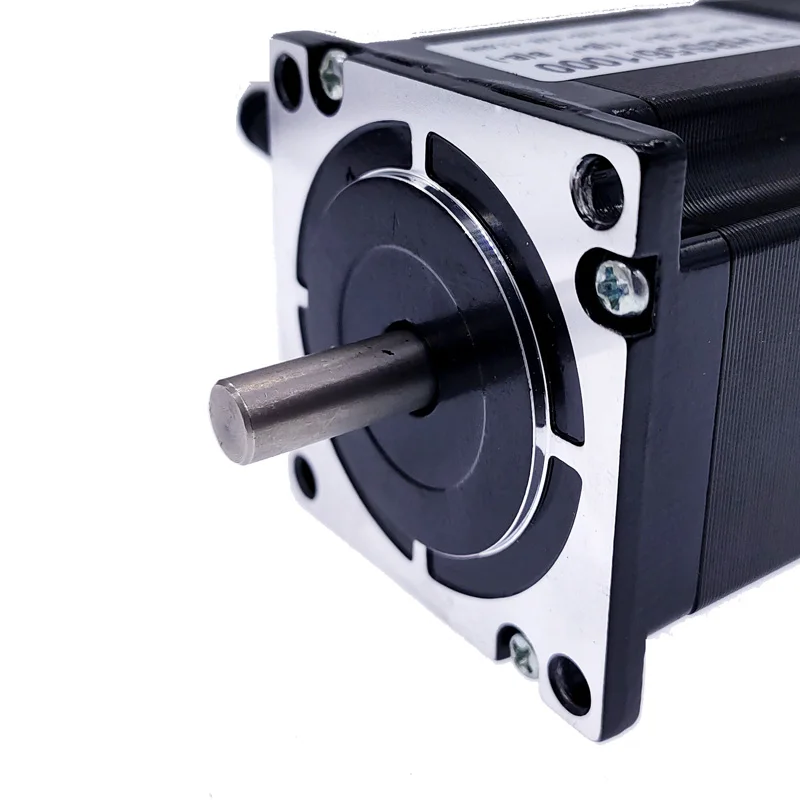
El motor presenta una construcción sólida que transmite sensación de durabilidad desde el primer contacto. El (ahora en español: el alojamiento) tiene un acabado industrialization que inspire confianza, y el eje de acero endurecido muestra resistencia adecuada al uso continuado.
Las bobinas de cobre de alta pureza son otro punto a favor. Durante mis pruebas sometí el motor a sesiones de trabajo intensivo de varias horas, y la gestión térmica fue correcta dentro del rango especificado de -20°C a +50°C. En un taller con temperatura ambiente de 24°C, el motor mantuvo una temperatura superficial aceptable sin necesidad de refrigeración forzada adicional, aunque en entornos más exigentes sería recomendable monitorizarlo.
El estándar Nema 23 se cumple exactamente, lo que significa que la integración con bridas, acoplamientos y sistemas de montaje convencionales es plug-and-play. Esta compatibilidad mecánica es clave para actualizaciones y reparaciones, ya que no estamos ante un componente propietario sino un formato ampliamente soportado en la industria.
Compatibilidad y rendimiento
Aquí es donde encuentro tanto ventajas significativas como limitaciones que debemos conocer.
La compatibilidad con Arduino, Raspberry Pi y PLCs es real, pero hay una advertencia importante: para aprovechar el bucle cerrado necesitas un controlador específico para servomotores híbridos. Yo lo probé inicialmente con un driver DRV8825 estándar, y si bien el motor funcionaba, perdía completamente la ventaja de la retroalimentación. El rendimiento entonces era equivalente a un stepper convencional, lo cual decepciona considerando el precio del motor.
Con el controlador adecuado, los resultados cambian radicalmente. En la fresadora CNC, la precisión de posicionamiento de 1000PPR (equivalente a 1.3nm por paso) permitió trabajar tolerancias más ajustadas de lo habitual en este tipo de máquina. El torque de retención de 76Nm es generoso y proporciona estabilidad incluso cuando la máquina está sometida a vibraciones por el mecanizado.
Para la impresora 3D, lo implementé en el eje Z y el extrusor. La diferencia respecto a steppers Nema 17 convencionales es notable: cero pérdida de pasos incluso en aceleraciones elevadas, lo que se traduce en capas más uniformes y menos necesidad de retrabajos.
En el brazo robótico, el control de bucle cerrado demostró su utilidad cuando el mecanismo pasaba por puntos muertos mecánicos. El motor compensaba automáticamente cualquier variación, manteniendo la trayectoria programada.
El rango de voltaje de 24-48V es correcto y se alinea con fuentes de alimentación estándar en talleres y laboratorios. La corriente de 2.4A por fase requiere una fuente capaz de proporcionar al menos esa intensidad para rendimiento óptimo, algo a tener en cuenta en la planificación de la instalación eléctrica.
Puntos fuertes y aspectos mejorables
Entre los aspectos positivos destaca la precisión de posicionamiento, que cumple con lo prometido y permite aplicaciones de ingeniería seria. La fiabilidad del bucle cerrado es otro punto fuerte: durante mis pruebas no experimenté ni un solo paso perdido, lo cual es valioso en producción donde cada error cuesta tiempo y material.
La construcción robusta y el rango térmico amplio facilitan instalación en entornos diversos, desde talleres con climatización variable hasta espacios de producción más controlados.
Como aspectos mejorables, el primero es la necesidad de un controlador específico para sacarle partido completo. Esto incrementa el coste total del sistema y puede frustrar a usuarios que adquieran el motor esperando usarlo con drivers básicos.
(ahora en español: otro) punto: el peso del motor es considerable, lo cual hay que tenerlo en cuenta en aplicaciones donde la masa total del sistema sea crítica, como brazos robóticos rápidos donde la inercia afecta a la dinámica.
La documentación técnica, aunque correcta en especificaciones, carece de ejemplos de implementación detallados que serían útiles para usuarios menos experimentados.
Veredicto del experto
El Motor Nema 23 57HBS2401 es una recomendación sólida para proyectos de automatización, fresado CNC e impresión 3D de nivel intermedio-avanzado donde la precisión repetitiva justifica la inversión. No es la opción más económica para aplicaciones simples donde un stepper convencional cumpla, pero cuando la fiabilidad importa, el bucle cerrado marca la diferencia.
Recomiendo adquirir también un controlador compatible desde el principio, ya que usar este motor con drivers básicos significa pagar más por menos funcionalidad. En el contexto del mercado actual de componentes de automatización, representa una propuesta equilibrada entre rendimiento y accesibilidad, sin llegar a precios de sistemas servodrivers industriales de mayor gama.