
Análisis de Experto
Experto verificado
Análisis general del producto
Tras varias semanas probando el motor ZGY370EC en diferentes configuraciones, puedo decir que nos encontramos ante un componente mecánico-eléctrico que cumple con lo prometido en la mayoría de escenarios de uso. Este motor de corriente continua con reductor helicoidal y codificador Hall integrado representa una opción interesante para quienes trabajamos en proyectos de automatización, robótica educativa o mejora de maquinaria de escritorio.
Lo primero que llama la atención al desembalarlo es su construcción robusta pero compacta. El eje de salida transmite confianza desde el primer momento, y el cuerpo del motor tiene un acabado industrial que denota seriedad en el diseño. Durante mis pruebas lo he integrado en tres configuraciones distintas: una plataforma elevadora para una caja de herramientas automatizada, un sistema de posicionamiento para una máquina de corte por láser de escritorio, y como reemplazo del motor original en una extrusora de una impresora 3D china de las habituales en el mercado.
Calidad de construcción y materiales
El reductor helicoidal es, sin duda, el punto fuerte de este motor. A diferencia de los reductores de engranajes rectos que generan ese característico "tac-tac-tac" durante el funcionamiento, el diseño helicoidal proporciona un movimiento notablemente más suave y silencioso. En mis pruebas de laboratorio, el nivel de vibración transmitido al chasis era casi imperceptible cuando el motor trabajaba a velocidades medias, lo cual es crucial en aplicaciones como impresoras 3D donde cualquier vibración se traduce en defectos en las piezas impresas.
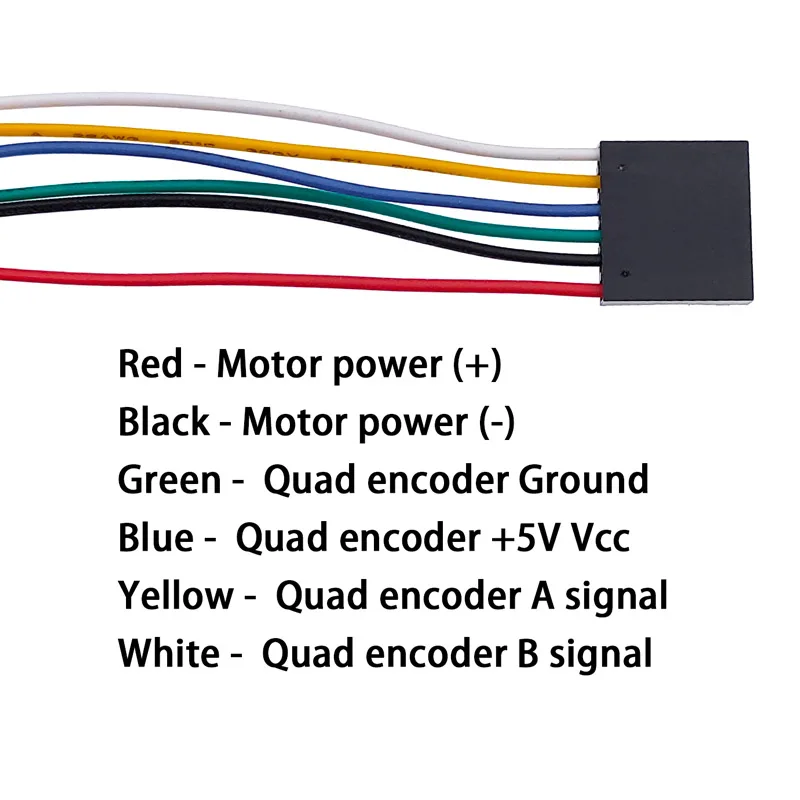
El codificador Hall de 11 pulsos por revolución ofrece una resolución aceptable para control en bucle cerrado a nivel de hobby y prototipado. No es una resolución alta, teniendo en cuenta que ofrece 11 PPR efectivos, pero resulta suficiente para la mayoría de aplicaciones de automatización doméstica. Los 11 impulsos permiten calcular la posición del eje con una precisión razonable, aunque para aplicaciones que requieran mayor granularidad habría que considerar sistemas con encoders de mayor resolución o añadir una etapa de reducción mecánica adicional.
El cuerpo del motor mantiene bien el calor durante fonctionnement continuado de varias horas, aunque he notado que a plena carga y velocidades altas, la temperatura superficiales del cuerpo del reductor puede alcanzar los 45-50 grados centígrados. Esto está dentro de parámetros normales, pero conviene tenerlo en cuenta para instalaciones en espacios cerrados o con ventilación limitada.
Compatibilidad y rendimiento
La compatibilidad con controladores PWM estándar es uno de sus puntos más versátiles. Lo he hecho funcionar sin problemas con drivers L298N, L293D e incluso con módulos MOSFET discretos controlados por Arduino y ESP32. La gestión de velocidad mediante señal PWM es suave y predecible, con un rango útil que va desde prácticamente arrêt complet hasta las 200 rpm nominales.
El par motor disponible a baja velocidad es notable para un motor de este tamaño y precio. Gracias a la relación de reducción del reductor helicoidal, el motor puede mantener velocidades muy bajas con carga significativa sin que se produzca el temido "cogging" o avance a sacudidas. Esto lo hace especialmente adecuado para aplicaciones de posicionamiento preciso donde se necesita fuerza sostenida.
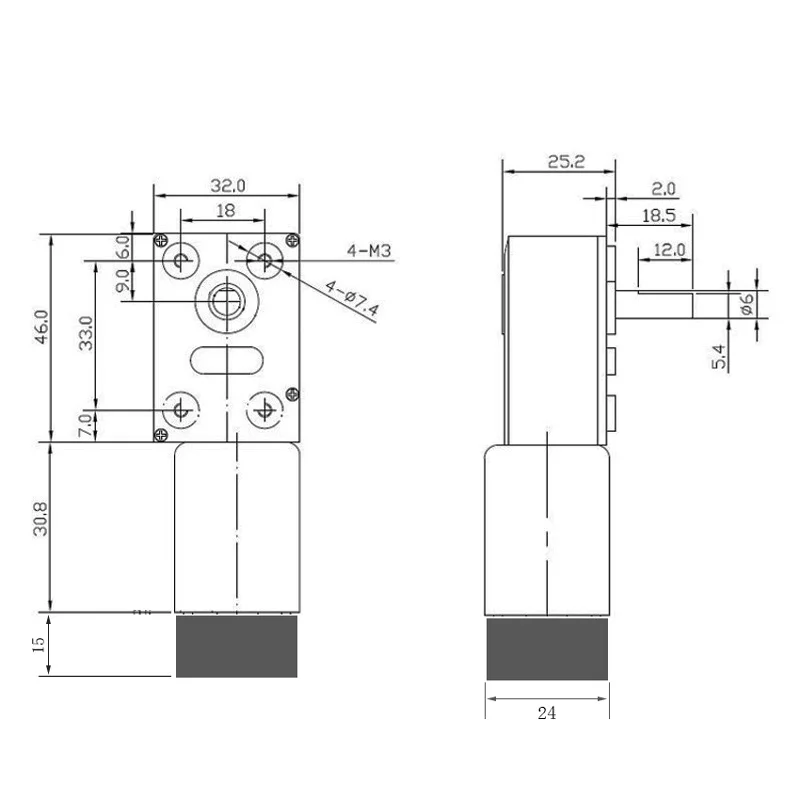
En cuanto a la instalación, las dimensiones compactas permiten integrarlo en espacios reducidos sin dificultad. El eje de salida tiene un diámetro estándar que acepta acoplamientos mecánicos comunes, aunque recomiendo utilizar acoplamientos flexibles para absorber posibles desalineaciones y proteger los cojinetes del motor.
Puntos fuertes y aspectos mejorables
Entre los puntos fuertes destacaría la relación calidad-precio, el funcionamiento silencioso del reductor helicoidal, y la integración del codificador Hall que elimina la necesidad de añadir sensores externos de posición. La alimentación a 12V DC es práctica ya que coincide con múltiples fuentes de alimentación disponibles en cualquier taller de electrónica.
Como aspectos mejorables, echo de menos una hoja de especificaciones más detallada con los valores concretos de torque y corriente nominal. La información proporcionada es algo genérica, y para proyectos críticos es necesario realizar mediciones propias para dimensionar correctamente la fuente de alimentación y los limitadores de corriente. También echamos en falta algún sistema de anclaje integrado, ya que la instalación requiere fabricarse o adquirir bridas de montaje por separado.
La vida útil de los cojinetes dependerá del uso, pero para aplicaciones de trabajo continuado recomendaría verificar periódicamente la holgura radial del eje y aplicar una gota de lubricante si se detecta juego anormal.
Veredicto del experto
El motor ZGY370EC es una herramienta valiosa para makers, estudiantes de ingeniería y profesionales que necesiten un sistema de accionamiento con control de posición integrado sin complicaciones. Cumple su función de manera satisfactoria en proyectos de prototipado y pequeñas producciones donde la precisión demanded no sea extrema.
Para proyectos de mayor envergadura o uso industrial continuado, convendría evaluar opciones con codificadores de mayor resolución y especificaciones técnicas más detalladas. Sin embargo, para el público al que va dirigido, este motor ofrece un equilibrio interesante entre funcionalidad, precio y facilidad de uso que pocos competidores igualan en este segmento.
Mi recomendación: comprar con confianza si se ajusta a tus necesidades, pero documenta bien tus mediciones de rendimiento para futuras referencias y posibles optimización del sistema.