


En Stock
29,99 €
Con la garantía de 
3 unidades vendidas
Última actualización: 2026-03-04T01:09:16.268Z
Descripción
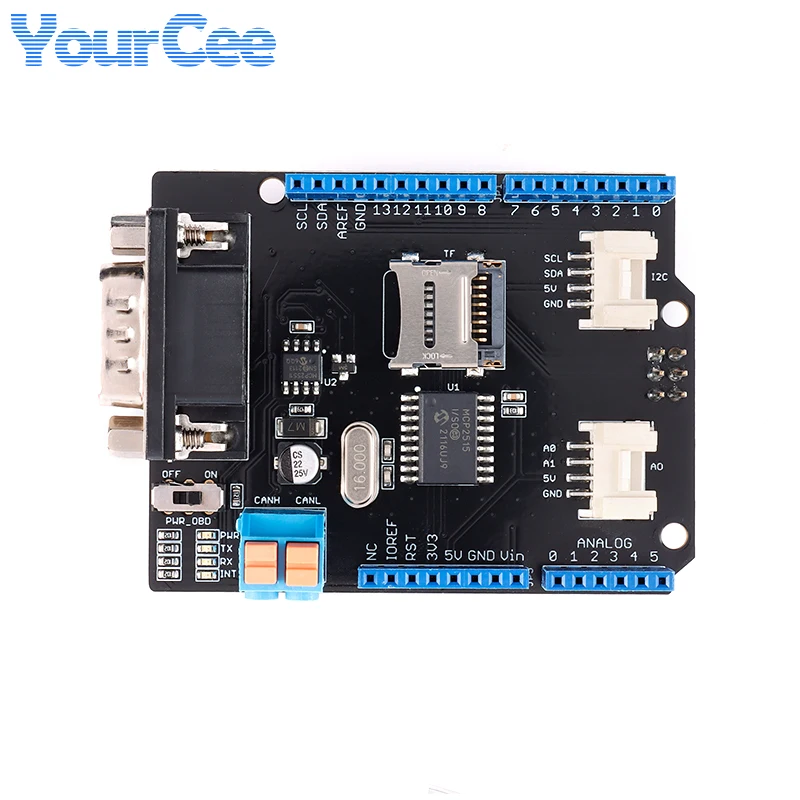
CAN-BUS es un bus industrial común debido a su larga distancia de viaje, velocidad de comunicación media y alta confiabilidad. Se encuentra comúnmente en máquinas herramientas modernas, como un autobús de diagnóstico automotriz.Este escudo CAN-BUS adopta el controlador CAN Bus MCP2515 con interfaz SPI y el transceptor CAN MCP2551 para brindar su capacidad CAN-BUS para Arduino/Seeeduino. Con un cable convertidor de OBD-II agregado y la biblioteca de la OBD-II importada, está listo para construir un dispositivo de diagnóstico integrado o Registrador de datos.Características:Implementa una velocidad CAN V2.0B de hasta 1 Mb/sVelocidad de interfaz SPI de hasta 10 MHzDatos estándar (11 bits) y extendidos (29 bits) y tramas remotasDos búferes de recepción con almacenamiento de mensajes priorizadosConector de estándar industrial,Indicadores led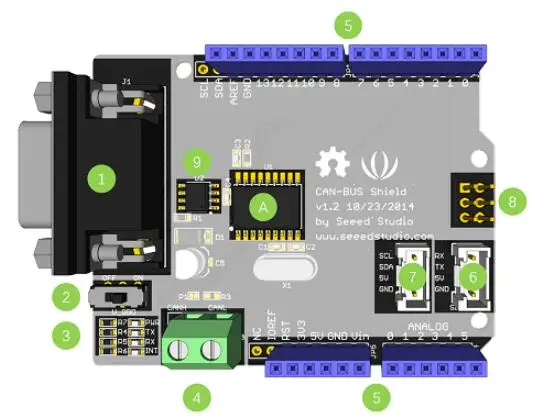 1. Interfaz DB9-para conectarse a la interfaz OBDII a través de un cable de la red de cable. 2.V_OBD: obtiene energía de la interfaz OBDII (de DB9) 3. Indicador LED: PWR: potencia TX: parpadea cuando se envían los datos RX: parpadea cuando hay Recepción de datos INT: Interrupción de datos 4.Terminal - CAN_H y CAN_L 5. Para Arduino UNO pin out 6. Conector de serie Grove 7. Conector I2C Grove 8. Pines ICSP 9. IC-MCP2551, un transceptor CAN de alta velocidad 10.-MCP2515 IC, controlador CAN independiente con interfaz SPI
1. Interfaz DB9-para conectarse a la interfaz OBDII a través de un cable de la red de cable. 2.V_OBD: obtiene energía de la interfaz OBDII (de DB9) 3. Indicador LED: PWR: potencia TX: parpadea cuando se envían los datos RX: parpadea cuando hay Recepción de datos INT: Interrupción de datos 4.Terminal - CAN_H y CAN_L 5. Para Arduino UNO pin out 6. Conector de serie Grove 7. Conector I2C Grove 8. Pines ICSP 9. IC-MCP2551, un transceptor CAN de alta velocidad 10.-MCP2515 IC, controlador CAN independiente con interfaz SPI
1. Interfaz DB9-para conectarse a la interfaz OBDII a través de un cable de la red de cable. 2.V_OBD: obtiene energía de la interfaz OBDII (de DB9) 3. Indicador LED: PWR: potencia TX: parpadea cuando se envían los datos RX: parpadea cuando hay Recepción de datos INT: Interrupción de datos 4.Terminal - CAN_H y CAN_L 5. Para Arduino UNO pin out 6. Conector de serie Grove 7. Conector I2C Grove 8. Pines ICSP 9. IC-MCP2551, un transceptor CAN de alta velocidad 10.-MCP2515 IC, controlador CAN independiente con interfaz SPI
Opiniones de clientes
1 opinionesK
12 de noviembre de 2025





