En Stock
0,9 €
Con la garantía de 
Color
28 unidades vendidas
Última actualización: 2026-01-29T23:45:57.166Z
Descripción
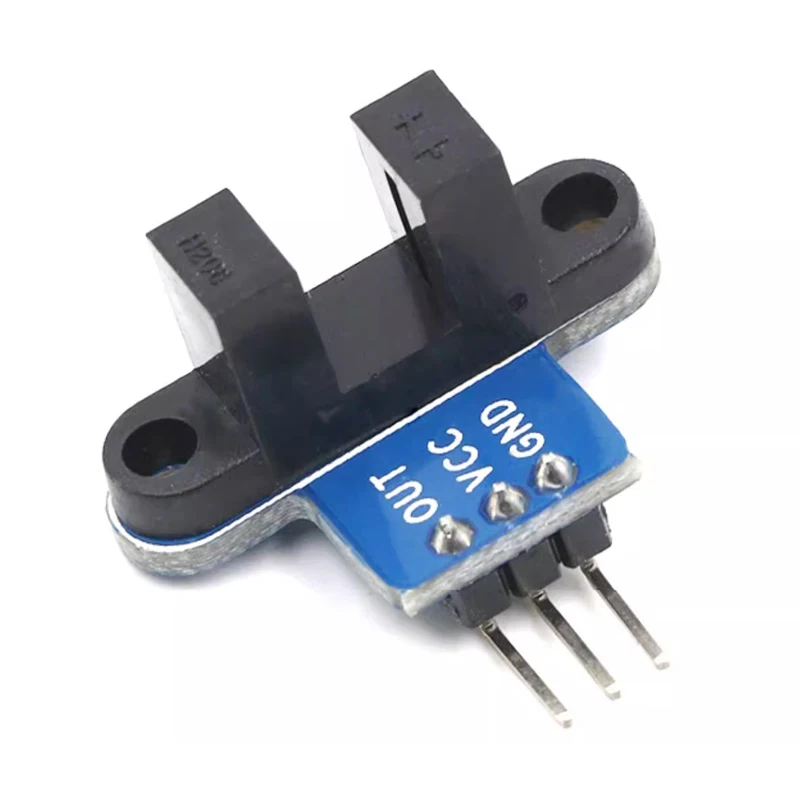
Características del producto:El sensor fotoeléctrico tipo ranura se compone de un diodo emisor de luz infrarroja y un fototransistor NPN con un ancho de ranura de 5,9 mm.Siempre que el objeto no transparente pase a través del tipo de ranura, se puede activar (usado con la rueda de códigos del automóvil del taller) para generar un nivel bajo TTL.El gatillo Schmitt se usa para agitar el pulso, que es muy estable y se puede usar para medir la velocidad del automóvil, medir la distancia y similares.Orificios de montaje para tornillos M3 en ambos extremos.Parámetros del producto:Voltaje de funcionamiento: 3,3 V-5 VForma de salida: interruptor digital Salida OUT (0 y 1)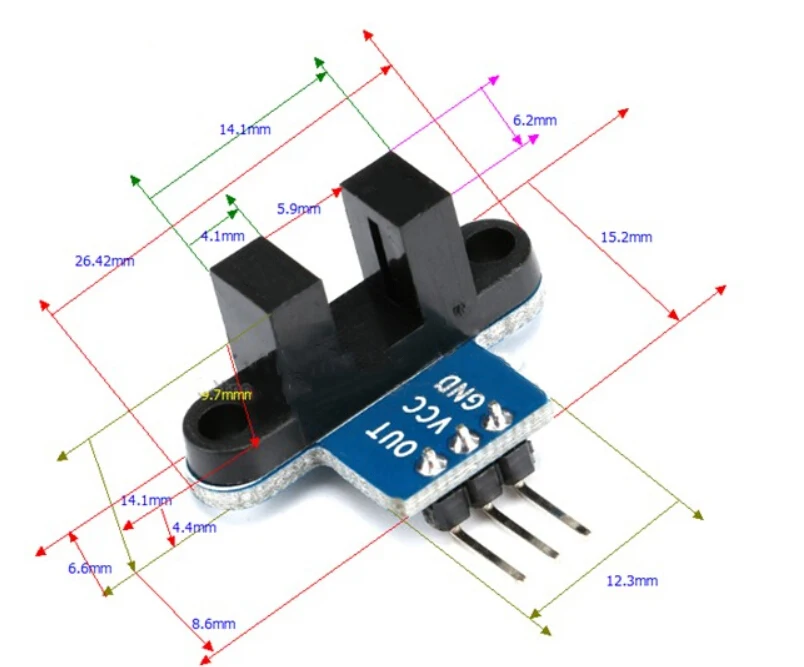
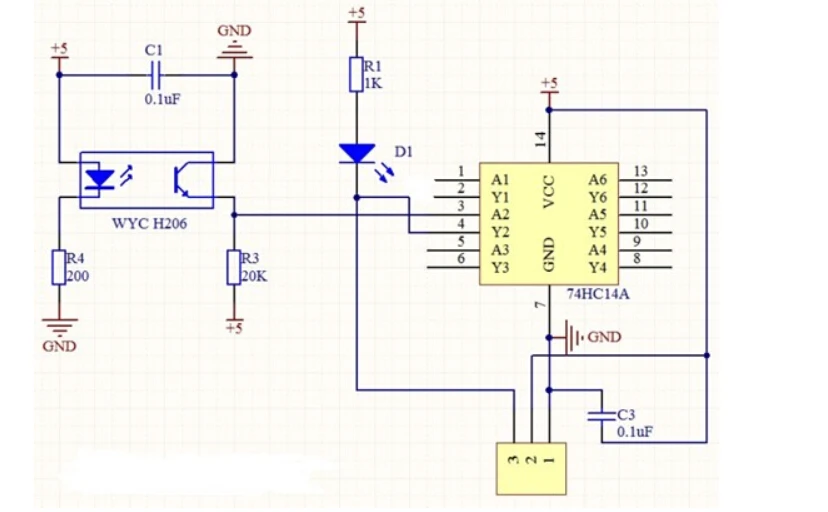 Cuando VCC y GND están conectados, el indicador de señal del módulo estará encendido.Cuando no hay ningún bloqueo en la ranura del módulo, el tubo receptor se enciende y la salida del módulo genera un nivel alto.Al bloquear, la salida OUT es baja y el indicador de señal está apagado.El módulo OUT se puede conectar al relé para formar un interruptor de límite y otras funciones, y también se puede conectar al módulo de timbre activo para formar una alarma.La interfaz de salida OUT se puede conectar directamente al puerto IO de la MCU.Generalmente, está conectado a una interrupción externa para detectar si el sensor tiene una oclusión.Por ejemplo, la rueda de código del motor puede detectar la velocidad del motor.Programación:El puerto OUT del módulo de medición de velocidad está vinculado al puerto de interrupción externo de la MCU.Siempre que haya conducción de rayos infrarrojos, es un búfer externo.Diseño lógico:Distancia de medición:La salida del sensor de velocidad es una señal de pulso, un pulso se interrumpe una vez; el rayo infrarrojo es bajo cuando está encendido, por lo que configuramos la interrupción en el modo táctil de bajo nivel.Hay cuadrículas enteras en la rueda de códigos general.No importa cuántas rejillas estén en principio, por ejemplo, 10 rejillas es decir, hay 10 espacios.Después de que el motor gire, el rayo se enciende 10 veces y el nivel bajo externo es 10 veces.Instale las ideas anteriores, nuestro sensor de velocidad puede tener el efecto, sabemos que hay 10 interrupciones en un círculo, por lo que calcalizamos el número de interrupciones, el número total de veces obtenidas se divide por 10 es el número de rotación del motor, y luego de acuerdo con la rueda El perímetro, calculando cuánto dura la rueda, puede descubrir qué tan lejos ha recorrido el coche.Velocidad de medición:De acuerdo con la idea de medir la distancia, utilizamos un temporizador MCU para calcular cuántas interrupciones externas se reciben en un segundo.Por ejemplo, si recibimos 20 interrupciones externas en un segundo, podemos juzgar que la velocidad del automóvil es de 1 segundo y la rueda pequeña gira dos veces.Luego calcula la circunferencia de la rueda pequeña, podrás conocer la velocidad del coche durante 1 segundo.Precauciones:¡Cableado correcto! No invierta el positivo y el negativo para que la electrónica de la placa se queme. Los reproductores Arduino deben configurar el puerto de E/S de la MCU en modo de entrada/modo de recepción; de lo contrario, no estarán disponibles. Otras MCU u placas de control más avanzadas como ARM deben configurarse en modo de entrada/modo de recepción si el puerto de E/S debe configurarse en modo de entrada/salida; de lo contrario, no se podrá utilizar. El MCU serie 51 se puede utilizar directamente sin configurar el modo de entrada/salida.
Cuando VCC y GND están conectados, el indicador de señal del módulo estará encendido.Cuando no hay ningún bloqueo en la ranura del módulo, el tubo receptor se enciende y la salida del módulo genera un nivel alto.Al bloquear, la salida OUT es baja y el indicador de señal está apagado.El módulo OUT se puede conectar al relé para formar un interruptor de límite y otras funciones, y también se puede conectar al módulo de timbre activo para formar una alarma.La interfaz de salida OUT se puede conectar directamente al puerto IO de la MCU.Generalmente, está conectado a una interrupción externa para detectar si el sensor tiene una oclusión.Por ejemplo, la rueda de código del motor puede detectar la velocidad del motor.Programación:El puerto OUT del módulo de medición de velocidad está vinculado al puerto de interrupción externo de la MCU.Siempre que haya conducción de rayos infrarrojos, es un búfer externo.Diseño lógico:Distancia de medición:La salida del sensor de velocidad es una señal de pulso, un pulso se interrumpe una vez; el rayo infrarrojo es bajo cuando está encendido, por lo que configuramos la interrupción en el modo táctil de bajo nivel.Hay cuadrículas enteras en la rueda de códigos general.No importa cuántas rejillas estén en principio, por ejemplo, 10 rejillas es decir, hay 10 espacios.Después de que el motor gire, el rayo se enciende 10 veces y el nivel bajo externo es 10 veces.Instale las ideas anteriores, nuestro sensor de velocidad puede tener el efecto, sabemos que hay 10 interrupciones en un círculo, por lo que calcalizamos el número de interrupciones, el número total de veces obtenidas se divide por 10 es el número de rotación del motor, y luego de acuerdo con la rueda El perímetro, calculando cuánto dura la rueda, puede descubrir qué tan lejos ha recorrido el coche.Velocidad de medición:De acuerdo con la idea de medir la distancia, utilizamos un temporizador MCU para calcular cuántas interrupciones externas se reciben en un segundo.Por ejemplo, si recibimos 20 interrupciones externas en un segundo, podemos juzgar que la velocidad del automóvil es de 1 segundo y la rueda pequeña gira dos veces.Luego calcula la circunferencia de la rueda pequeña, podrás conocer la velocidad del coche durante 1 segundo.Precauciones:¡Cableado correcto! No invierta el positivo y el negativo para que la electrónica de la placa se queme. Los reproductores Arduino deben configurar el puerto de E/S de la MCU en modo de entrada/modo de recepción; de lo contrario, no estarán disponibles. Otras MCU u placas de control más avanzadas como ARM deben configurarse en modo de entrada/modo de recepción si el puerto de E/S debe configurarse en modo de entrada/salida; de lo contrario, no se podrá utilizar. El MCU serie 51 se puede utilizar directamente sin configurar el modo de entrada/salida.
Cuando VCC y GND están conectados, el indicador de señal del módulo estará encendido.Cuando no hay ningún bloqueo en la ranura del módulo, el tubo receptor se enciende y la salida del módulo genera un nivel alto.Al bloquear, la salida OUT es baja y el indicador de señal está apagado.El módulo OUT se puede conectar al relé para formar un interruptor de límite y otras funciones, y también se puede conectar al módulo de timbre activo para formar una alarma.La interfaz de salida OUT se puede conectar directamente al puerto IO de la MCU.Generalmente, está conectado a una interrupción externa para detectar si el sensor tiene una oclusión.Por ejemplo, la rueda de código del motor puede detectar la velocidad del motor.Programación:El puerto OUT del módulo de medición de velocidad está vinculado al puerto de interrupción externo de la MCU.Siempre que haya conducción de rayos infrarrojos, es un búfer externo.Diseño lógico:Distancia de medición:La salida del sensor de velocidad es una señal de pulso, un pulso se interrumpe una vez; el rayo infrarrojo es bajo cuando está encendido, por lo que configuramos la interrupción en el modo táctil de bajo nivel.Hay cuadrículas enteras en la rueda de códigos general.No importa cuántas rejillas estén en principio, por ejemplo, 10 rejillas es decir, hay 10 espacios.Después de que el motor gire, el rayo se enciende 10 veces y el nivel bajo externo es 10 veces.Instale las ideas anteriores, nuestro sensor de velocidad puede tener el efecto, sabemos que hay 10 interrupciones en un círculo, por lo que calcalizamos el número de interrupciones, el número total de veces obtenidas se divide por 10 es el número de rotación del motor, y luego de acuerdo con la rueda El perímetro, calculando cuánto dura la rueda, puede descubrir qué tan lejos ha recorrido el coche.Velocidad de medición:De acuerdo con la idea de medir la distancia, utilizamos un temporizador MCU para calcular cuántas interrupciones externas se reciben en un segundo.Por ejemplo, si recibimos 20 interrupciones externas en un segundo, podemos juzgar que la velocidad del automóvil es de 1 segundo y la rueda pequeña gira dos veces.Luego calcula la circunferencia de la rueda pequeña, podrás conocer la velocidad del coche durante 1 segundo.Precauciones:¡Cableado correcto! No invierta el positivo y el negativo para que la electrónica de la placa se queme. Los reproductores Arduino deben configurar el puerto de E/S de la MCU en modo de entrada/modo de recepción; de lo contrario, no estarán disponibles. Otras MCU u placas de control más avanzadas como ARM deben configurarse en modo de entrada/modo de recepción si el puerto de E/S debe configurarse en modo de entrada/salida; de lo contrario, no se podrá utilizar. El MCU serie 51 se puede utilizar directamente sin configurar el modo de entrada/salida.
Opiniones de clientes
2 opinionesS
9 de junio de 2025
Г
2 de junio de 2025