
Color
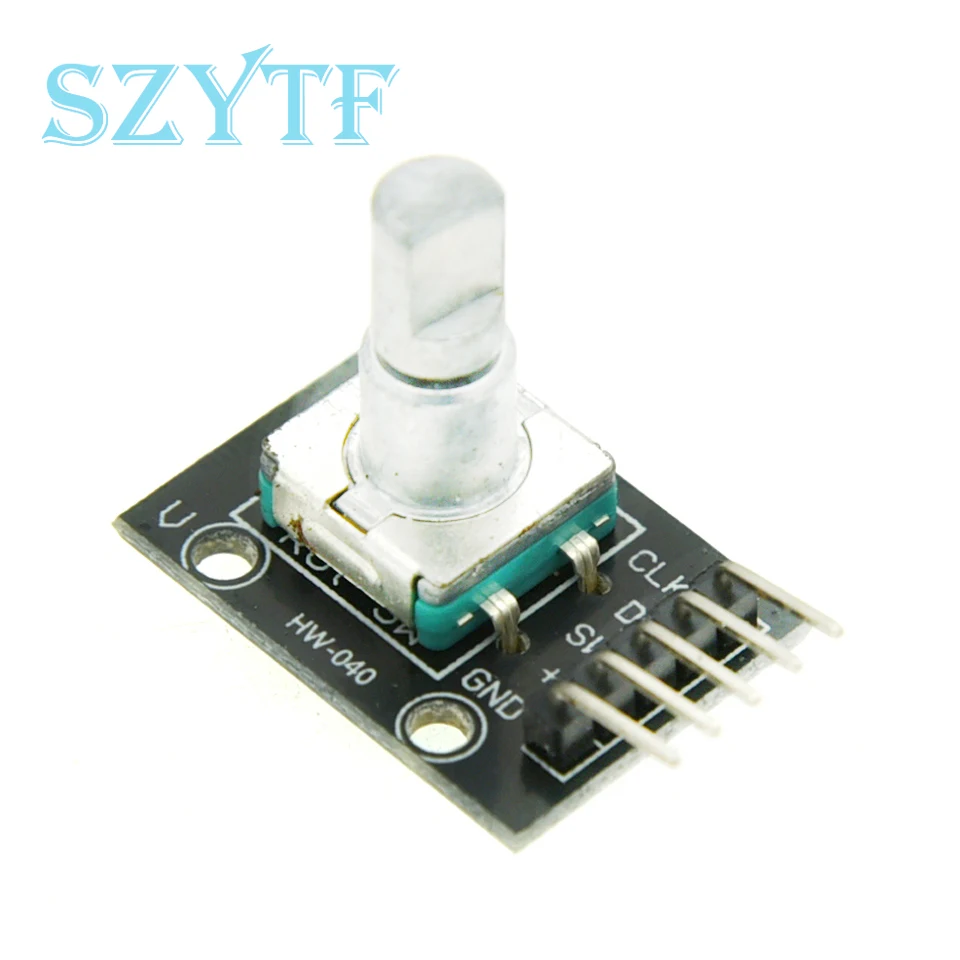
Descripción
Voltaje de funcionamiento: 5V
Cuenta de pulsos en una vuelta: 20
El codificador rotatorio puede contar el número de pulsos de salida en la dirección hacia adelante y la dirección inversa por rotación. A diferencia del potenciómetro, el recuento de rotación es ilimitado. Con la llave en el codificador rotatorio, se puede restablecer al estado inicial, es decir, contando desde 0.
Principio de funcionamiento:
El codificador incremental es un sensor giratorio que convierte el desplazamiento giratorio en una serie de señales de pulso digitales. Estos pulsos se utilizan para controlar el desplazamiento angular. La Conversión de desplazamiento angular en el codificador Eltra se basa en el principio de escaneo fotoeléctrico. El sistema de lectura se basa en la rotación de un dial radial (dial de código) que consiste en luz alterna y ventanas opacas, iluminadas simultáneamente en vertical por una fuente de luz infrarroja. QUE PROYECTA LA IMAGEN DEL DIAL DE CÓDIGO EN LA SUPERFICIE DEL RECEPTOR. El receptor está cubierto con una rejilla de difracción, que tiene el mismo ancho de ventana que la placa de código. El trabajo del receptor es detectar los cambios causados por la rotación del disco y luego convertir los cambios ópticos en los cambios eléctricos correspondientes. La señal de bajo nivel se eleva luego al nivel alto para producir un pulso cuadrado sin ninguna interferencia, que debe ser procesado por circuitos electrónicos. El sistema de lectura suele ser diferencial, en el que se comparan dos señales diferentes con la misma forma de onda pero una diferencia de fase de 180 ° para mejorar la calidad y la estabilidad de la señal de salida. La lectura se basa en la diferencia entre las otras dos señales, eliminando así la interferencia.
Codificador incremental:
El codificador incremental proporciona ondas cuadradas de dos fases con una diferencia de fase de 90 °, comúnmente conocidas como canal A y Canal B. Uno de los canales proporciona información relacionada con la velocidad de rotación y, al mismo tiempo, la información de la dirección de rotación se obtiene mediante la comparación secuencial de las señales de los dos canales. También hay una señal especial llamada Z o canal cero, que da el bit cero del codificador. Esta señal es una onda cuadrada que coincide con la línea central de la onda cuadrada en el canal A.
La precisión del codificador incremental depende de factores mecánicos y eléctricos, como errores de indexación de rejilla, excentricidad del disco, excentricidad del rodamiento, errores introducidos por dispositivos de lectura electrónicos e inexactitudes ópticas. La unidad de medición para determinar la precisión del codificador es el grado eléctrico, y la precisión del codificador determina el grado de pulso producido por el codificador. A continuación, se utilizan 360 ° grados eléctricos para representar la rotación del eje mecánico, y la rotación del eje debe ser un ciclo completo. Para saber cuántos ángulos mecánicos equivalen a 360 grados eléctricos, use la siguiente fórmula: 360 eléctricos=360 mecánico/pulso N °/revolución
Figura: Señal de marcha atrás de A y B
El error de indexación del codificador se expresa como el desplazamiento de dos ondas de pulso consecutivas en ángulo eléctrico. Existe un error en cualquier codificador, que es causado por los factores anteriores. El codificador Eltra tiene un error de ± 25 ángulos eléctricos (bajo cualquier condición indicada), lo que corresponde a una compensación nominal de ± 7%, Y una desviación de ± 35 para dos canales con una diferencia de fase de 90 ° (eléctricamente). El grado eléctrico corresponde a una compensación nominal de aproximadamente ± 10%.
Codificador incremental de señal UVW
Además de los codificadores tradicionales anteriores, algunos son codificadores incrementales integrados con otras señales de salida eléctrica. Un ejemplo es el codificador incremental integrado con la señal UVW, que se utiliza comúnmente para la retroalimentación del Servomotor de CA. Estas señales de polo magnético generalmente aparecen en servomotores de CA, y las señales UVW generalmente se diseñan simulando la función de los componentes magnéticos. En el codificador Eltra, estas señales UVW se generan ópticamente y aparecen como tres ondas cuadradas, que están desplazadas 120 ° entre sí. Se requieren estas señales correctas para que el motor de arranque controle el motor para un arranque fácil. Estos pulsos de polo UVW se pueden repetir muchas veces en una rotación del eje mecánico porque dependen directamente del número de polos del motor conectados y se utilizan para señales UVW para motores de 4, 6 o más polos.
******************
Código de prueba:
Const int interruptA=0; /Interrupción 0 (pin 2)
Const int interruptB=1; /interrupción 1 (pin 3)
Int CLK=2; /PIN2
Int DAT=3; /PIN3
BOTÓN int=4; /PIN4
Int LED1=5; /PIN5
Int LED2=6; /PIN6
Int COUNT=0;
Configuración nula ()
{
AttachInterrupt (interruptA, RoteStateChanged, FALLING);
/AttachInterrupt (interruptB, buttonState, FALLING);
PinMode (CLK, INPUT);
DigitalWrite (2, ALTO); /Pull High Restance
PinMode (DAT, INPUT);
DigitalWrite (3, ALTO); /Pull High Restance
PinMode (BOTÓN, ENTRADA);
DigitalWrite (4, ALTO); /Pull High Restance
PinMode (LED1, SALIDA);
PinMode (LED2, SALIDA);
Serie. inicio (9600);
}
Bucle vacío ()
{
If (! (digitalRead (BOTÓN)
{
Recuento=0;
Serial.println ("STOP COUNT=0");
DigitalWrite (LED1, LOW);
DigitalWrite (LED2, LOW);
Retraso (2000);
}
Serial.println (COUNT);
}
/ / -------------------------------------------
Void RoteStateChanged () /Cuando CLK CAE LEER DAT
{
If (digitalRead (DAT)/Cuando DAT=ALTO ES FORWARD
{
CONTAR;
DigitalWrite (LED1, HIGH);
DigitalWrite (LED2, LOW);
Retraso (20);
}
Else/When DAT=LOW IS BackRote
{
CONTAR-;
DigitalWrite (LED2, ALTO);
DigitalWrite (LED1, LOW);
Retraso (20);
}
}






