En Stock
25,19 €
Con la garantía de 
Color
9 unidades vendidas
Última actualización: 2026-03-04T01:18:44.881Z
Descripción
CAN-BUS Shield V2 Información del producto
Descripción general del producto
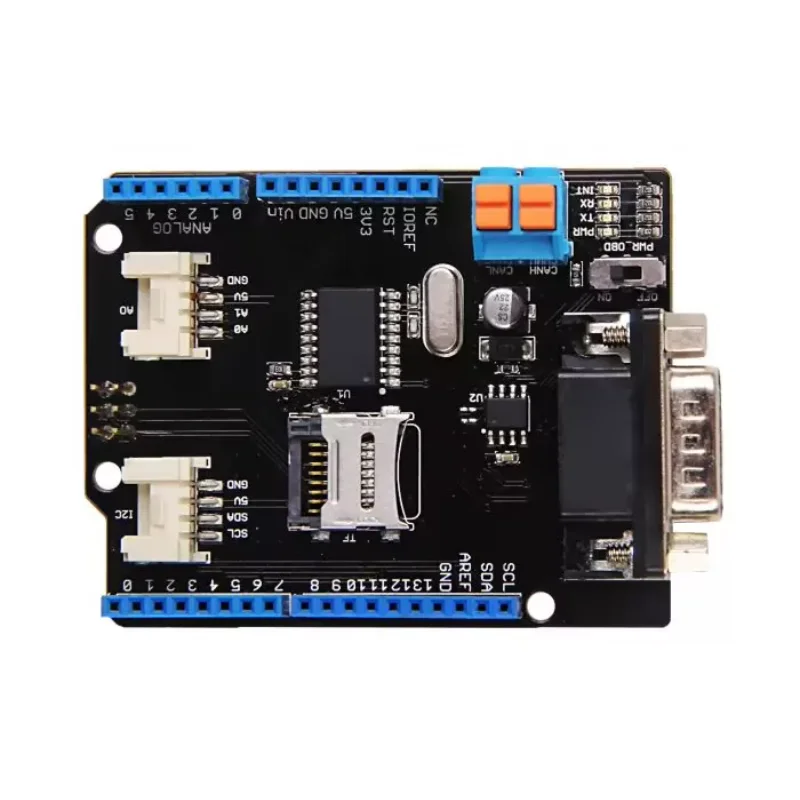
CAN-BUS Shield V2 es una placa de expansión de grado industrial basada en el controlador CAN MCP2515 y el transceptor de alta velocidad MCP2551, diseñada para Arduino/Raspberry Pi y otras plataformas de desarrollo.Es compatible con el protocolo CAN V2.0B (hasta 1 Mbps), es compatible con pines estándar OBD-II y CAN y puede usarse ampliamente en diagnósticos automotrices, control industrial, sistemas de robótica y otros escenarios.
función principal
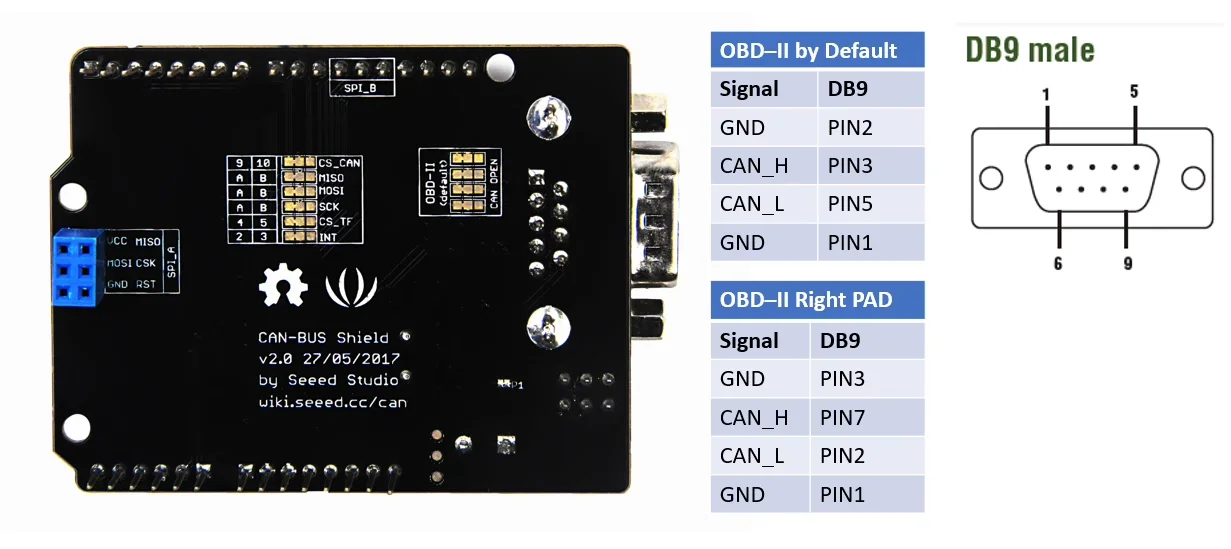
Configuración de pines de modo dual: cambie la disposición de pines estándar OBD-II o CAN a través del puente de interfaz DB9 y admita diagnóstico OBD-II de forma predeterminada.
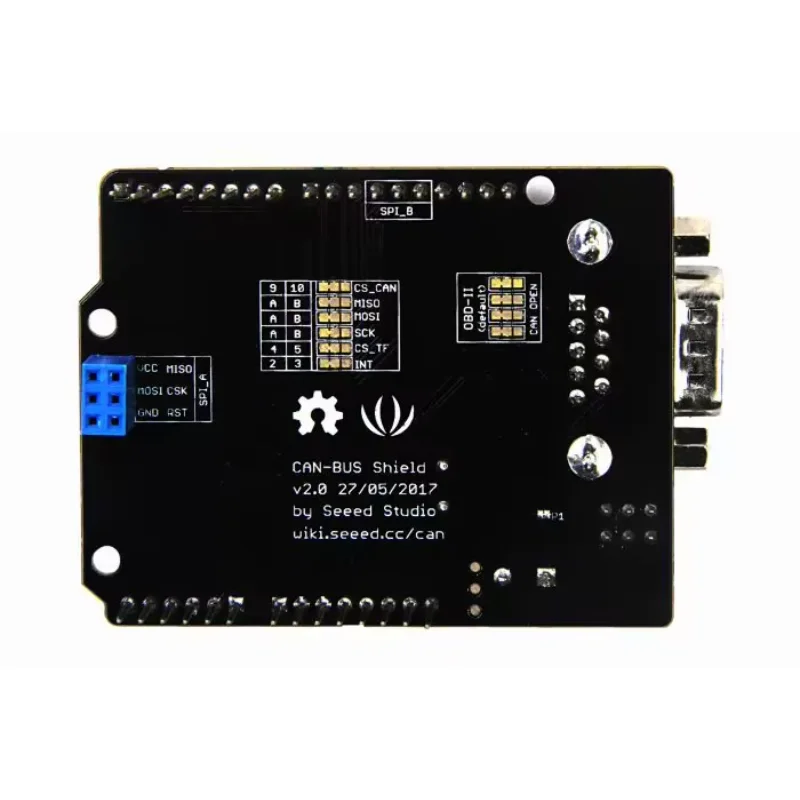
Personalización de pin flexible: pin de selección de chip, pin CS de ranura para tarjeta TF (D4/D5 opcional), pin de interrupción INT (D2/D3 opcional) que se puede configurar mediante un puente.
La almohadilla P1 se mueve hacia la parte posterior del tablero para facilitar el ajuste de corte cuando se conectan en cascada varias placas.
Expansión del almacenamiento de datos: ranura para tarjeta TF integrada para admitir el almacenamiento de datos en tiempo real.
Diseño de interfaz optimizado: los conectores Serial Grove se conmutan a pines A0/A1 y los conectores I2C utilizan pines SDA/SCL estándar, todos los cuales se cambian a direcciones horizontales para adaptarse a más módulos.
La interfaz DB9 integrada y los terminales de tornillo (CAN_H/CAN_L), admiten una variedad de conexiones.
Parámetros técnicos
Protocolo de comunicación: CAN V2.0B, admite fotogramas de datos estándar (11 bits) y extendidos (29 bits).
Velocidad máxima: 1Mbps (dependiendo de la distancia, se recomienda 500kbps dentro de 100m).
Tipo de interfaz: DB9 (OBD-II/CAN opcional), terminal de tornillo (CAN_H/CAN_L).
Encabezado Uno, 2 conectores Grove (I2C/UART), pines ICSP.
Entrada de energía: V_OBD (desde la interfaz OBD-II) o fuente de alimentación externa (aislada).
Indicación LED: PWR (fuente de alimentación), TX/RX (transceptor de datos), INT (señal de interrupción).
Tamaño y compatibilidad: se adapta a la ranura para tarjetas estándar Arduino, compatible con Raspberry Pi y otras plataformas de desarrollo.
Características del hardware
Solución de chip: MCP2515: controlador CAN independiente, admite interfaz SPI (hasta 10MHz).
MCP2551: Transceptor CAN de alta velocidad, fuerte capacidad antiinterferente.
Diseño de protección: diodo de supresión transitoria integrado para protección contra ESD y sobretensiones.
Función de almacenamiento: admite almacenamiento en tarjeta TF (es necesario configurar el pin CS a través del puente).
escenario de aplicación
Desarrollo del sistema de diagnóstico OBD-II automotriz.
Control de comunicación de bus CAN para equipos industriales.
Control de movimiento del robot e interacción de datos del sensor.
Integración del protocolo CAN del dispositivo de Internet de las cosas (IoT).
Precauciones de uso
Para el primer uso, seleccione el modo pin (OBD-II/CAN) a través del puente.
La función de almacenamiento de la tarjeta TF debe implementarse con un código personalizado.
Al conectar varias placas en cascada, es necesario cortar la plataforma P1 para evitar conflictos de direcciones.
Garantice un suministro de energía estable y evite la colubación con fuentes de interferencia fuertes.
Ventajas del producto:
Compatible con las principales plataformas de desarrollo, reduciendo el umbral de desarrollo.
Pines configurables y funciones de almacenamiento para satisfacer diversas necesidades.
Diseño de grado industrial para entornos de amplia temperatura y aplicaciones antiinterferencias.
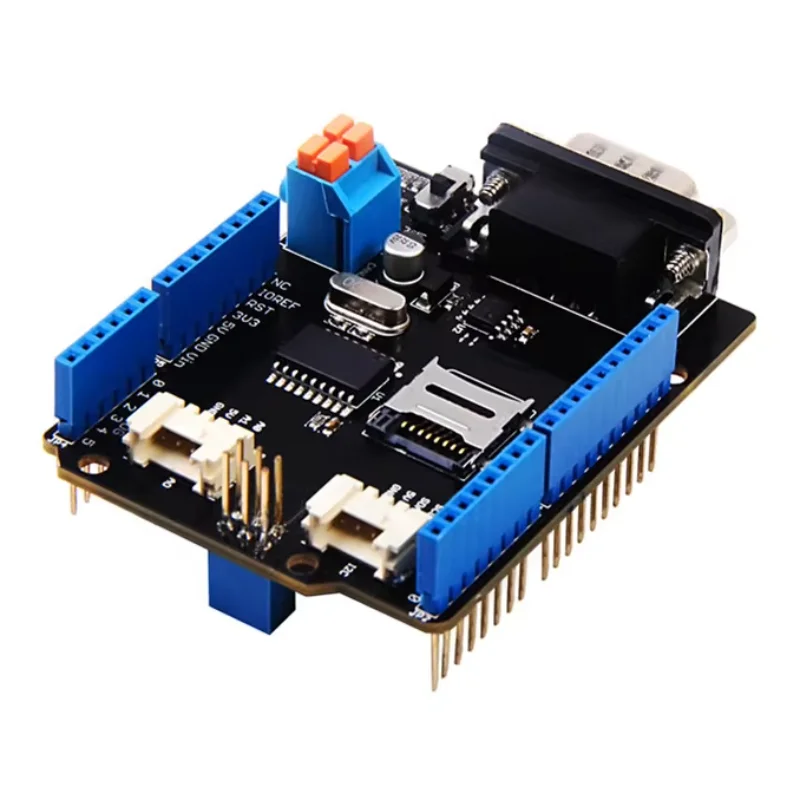
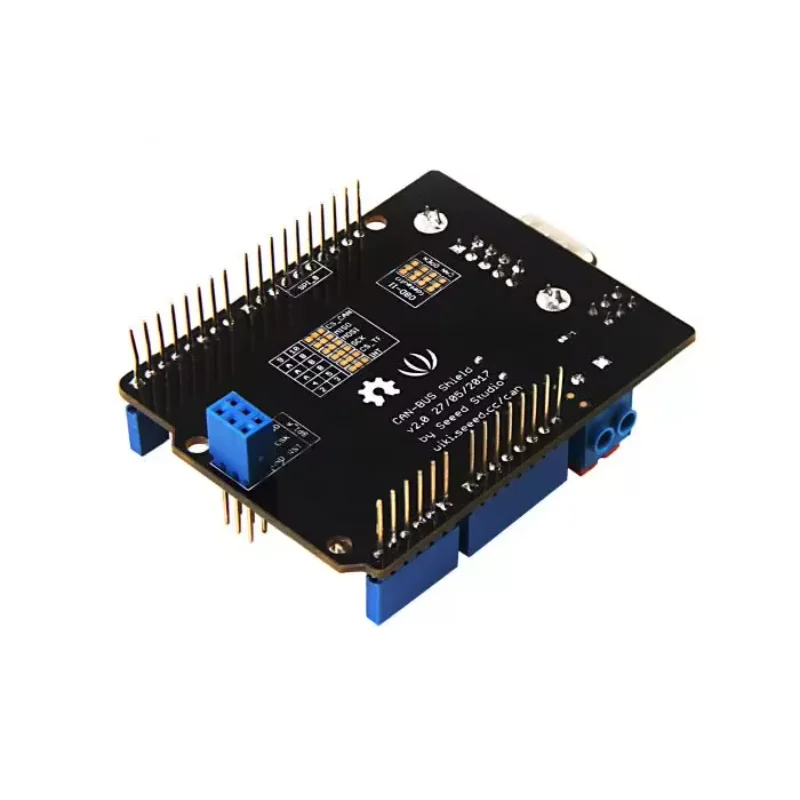
Descripción general del hardware del producto
Descripción general del producto
CAN-BUS Shield V2 es una placa de expansión de grado industrial basada en el controlador CAN MCP2515 y el transceptor de alta velocidad MCP2551, diseñada para Arduino/Raspberry Pi y otras plataformas de desarrollo.Es compatible con el protocolo CAN V2.0B (hasta 1 Mbps), es compatible con pines estándar OBD-II y CAN y puede usarse ampliamente en diagnósticos automotrices, control industrial, sistemas de robótica y otros escenarios.
función principal
Configuración de pines de modo dual: cambie la disposición de pines estándar OBD-II o CAN a través del puente de interfaz DB9 y admita diagnóstico OBD-II de forma predeterminada.
Personalización de pin flexible: pin de selección de chip, pin CS de ranura para tarjeta TF (D4/D5 opcional), pin de interrupción INT (D2/D3 opcional) que se puede configurar mediante un puente.
La almohadilla P1 se mueve hacia la parte posterior del tablero para facilitar el ajuste de corte cuando se conectan en cascada varias placas.
Expansión del almacenamiento de datos: ranura para tarjeta TF integrada para admitir el almacenamiento de datos en tiempo real.
Diseño de interfaz optimizado: los conectores Serial Grove se conmutan a pines A0/A1 y los conectores I2C utilizan pines SDA/SCL estándar, todos los cuales se cambian a direcciones horizontales para adaptarse a más módulos.
La interfaz DB9 integrada y los terminales de tornillo (CAN_H/CAN_L), admiten una variedad de conexiones.
Parámetros técnicos
Protocolo de comunicación: CAN V2.0B, admite fotogramas de datos estándar (11 bits) y extendidos (29 bits).
Velocidad máxima: 1Mbps (dependiendo de la distancia, se recomienda 500kbps dentro de 100m).
Tipo de interfaz: DB9 (OBD-II/CAN opcional), terminal de tornillo (CAN_H/CAN_L).
Encabezado Uno, 2 conectores Grove (I2C/UART), pines ICSP.
Entrada de energía: V_OBD (desde la interfaz OBD-II) o fuente de alimentación externa (aislada).
Indicación LED: PWR (fuente de alimentación), TX/RX (transceptor de datos), INT (señal de interrupción).
Tamaño y compatibilidad: se adapta a la ranura para tarjetas estándar Arduino, compatible con Raspberry Pi y otras plataformas de desarrollo.
Características del hardware
Solución de chip: MCP2515: controlador CAN independiente, admite interfaz SPI (hasta 10MHz).
MCP2551: Transceptor CAN de alta velocidad, fuerte capacidad antiinterferente.
Diseño de protección: diodo de supresión transitoria integrado para protección contra ESD y sobretensiones.
Función de almacenamiento: admite almacenamiento en tarjeta TF (es necesario configurar el pin CS a través del puente).
escenario de aplicación
Desarrollo del sistema de diagnóstico OBD-II automotriz.
Control de comunicación de bus CAN para equipos industriales.
Control de movimiento del robot e interacción de datos del sensor.
Integración del protocolo CAN del dispositivo de Internet de las cosas (IoT).
Precauciones de uso
Para el primer uso, seleccione el modo pin (OBD-II/CAN) a través del puente.
La función de almacenamiento de la tarjeta TF debe implementarse con un código personalizado.
Al conectar varias placas en cascada, es necesario cortar la plataforma P1 para evitar conflictos de direcciones.
Garantice un suministro de energía estable y evite la colubación con fuentes de interferencia fuertes.
Ventajas del producto:
Compatible con las principales plataformas de desarrollo, reduciendo el umbral de desarrollo.
Pines configurables y funciones de almacenamiento para satisfacer diversas necesidades.
Diseño de grado industrial para entornos de amplia temperatura y aplicaciones antiinterferencias.
Descripción general del hardware del producto
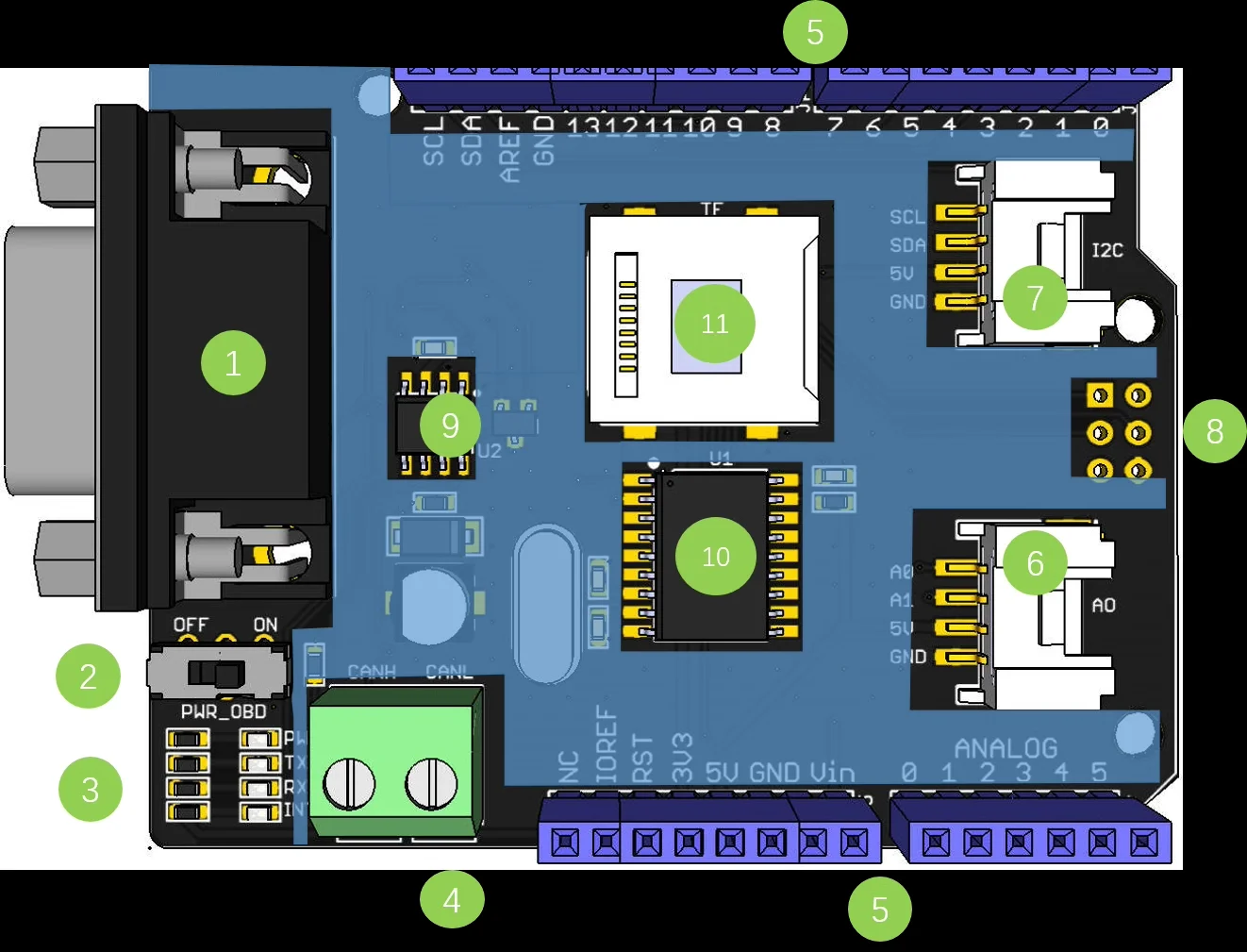
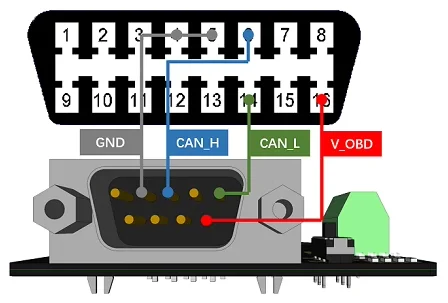
1.Interfaz DB9: conéctese a la interfaz OBDII mediante un cable DBG-OBD
V_OBD: obtenga energía desde la interfaz OBDII (de DB9)
3.Indicador LED:
PWR: Indicación de energía
TX: parpadea cuando se envían datos
RX: parpadea al recibir datos
INT: interrupción de datos
4. punto final: CAN_H y CAN_L
5.Pin UNO
6.Conector de ranura en serie
7.Conector de ranura I2C
8.Pin ICSP
9.IC-MCP2551, transceptor CAN de alta velocidad
10.IC-MCP2515, controlador CAN independiente con interfaz SPI
11.Ranura para tarjeta SD
4, diagrama de pines del producto