Color
Descripción
Detalles gráficos
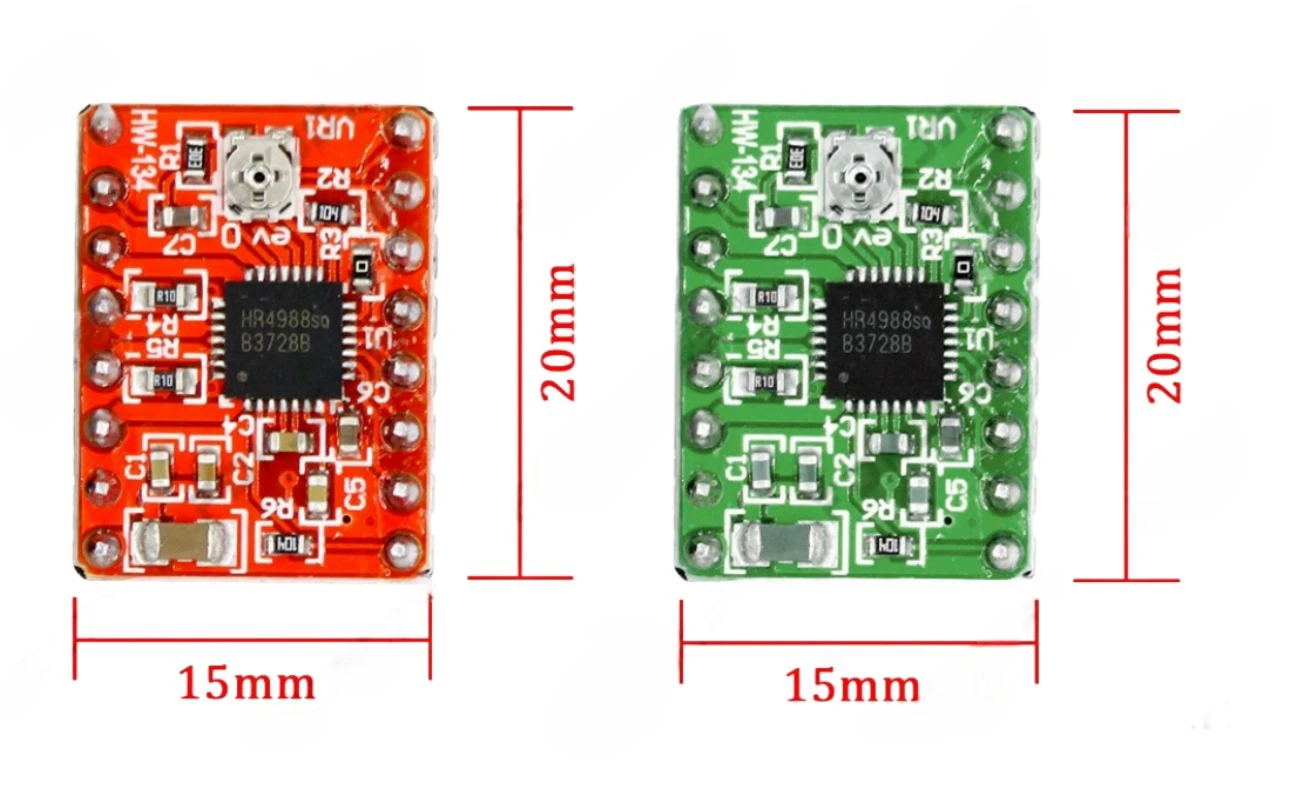
A4988
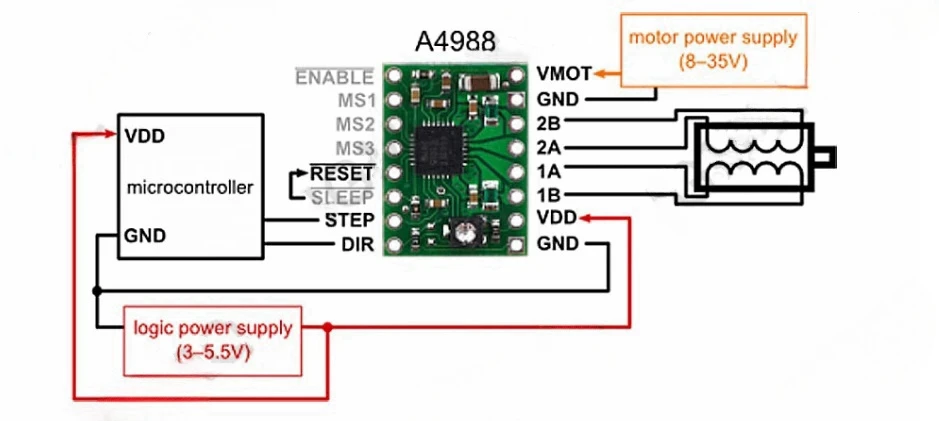
Este producto es una placa de conexión para el controlador de micropasos DMOS A4988 de Allegro conTraductor y protección contra sobrecorriente; lea atentamente la hoja de datos A4988 antes de usar este producto. Este controlador de motor paso a paso le permite operar motores paso a paso bipolares por completo, medio, cuarto, octavo, y modos de decimosexto paso, con una capacidad de accionamiento de salida de hasta 35 V y 2 A.
El traductor es la clave para la fácil implementación del A4988. Simplemente ingresando un pulso en la entrada STEP impulsa el motor un micropaso. No hay tablas de secuencia de fase, líneas de control de alta frecuencia o interfaces complejas para programar. La interfaz A4988 es ideal para aplicaciones donde un microprocesador complejo no está disponible o está sobrecargado.
Característica:
-Interfaz simple de control de paso y dirección;
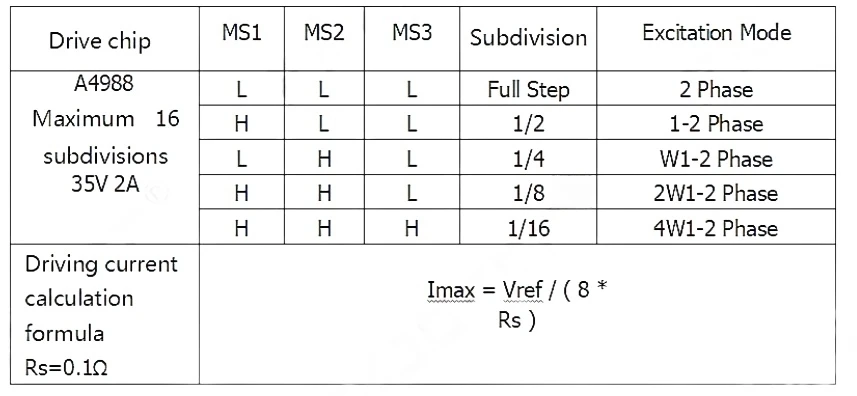
-Cinco resoluciones de pasos diferentes: paso completo, medio paso, cuarto paso, Octavo Paso yDecimosexto paso;
-El Control de corriente ajustable le permite establecer la salida de corriente máxima con unPotenciómetro, que le permite usar voltajes superiores a la clasificación de su motor paso a paso;
-Voltaje de paso para lograr tasas más altas;
-Fuente lógica compatible 3,3 y 5 V
-Control inteligente de corte que selecciona automáticamente el modo de caída de corriente correcto(Decaimiento rápido o lento);
-Apagado térmico por exceso de temperatura, bloqueo por bajo voltaje y corriente cruzadaProtección;
-Protección de corto a tierra y de cortocircuito.
Subdivisión:
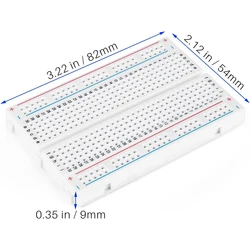
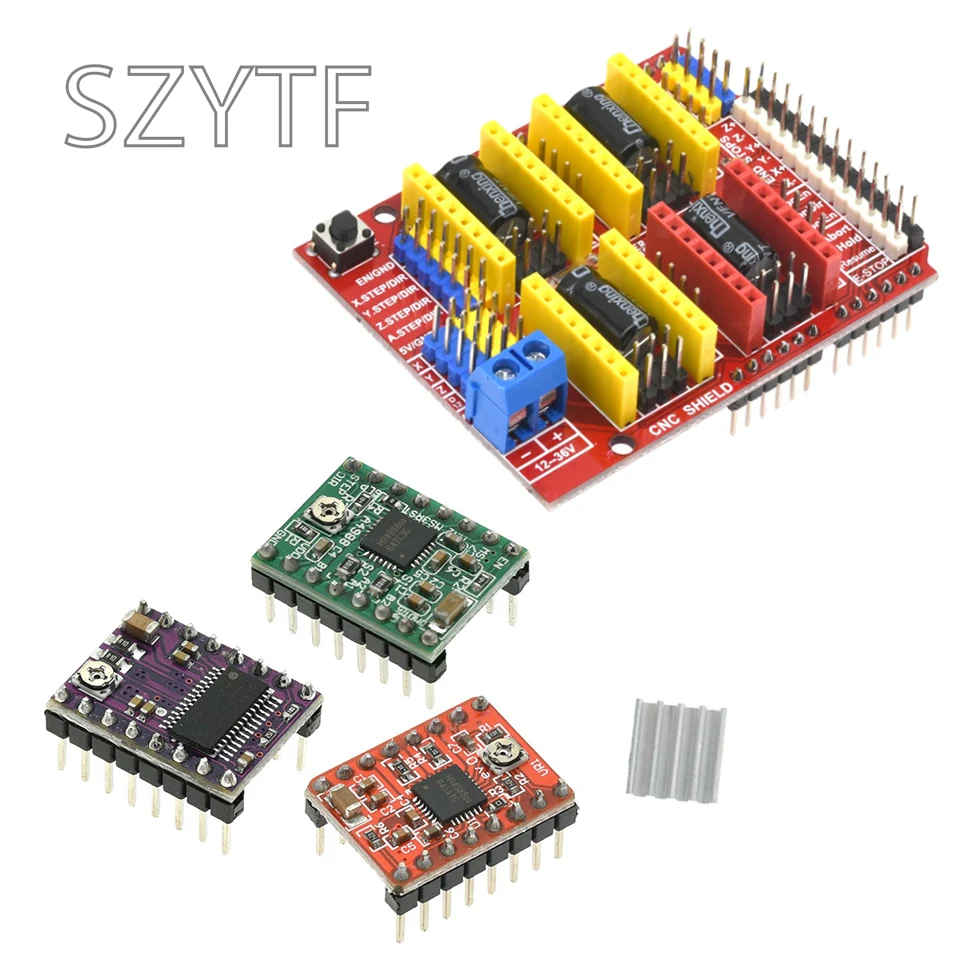
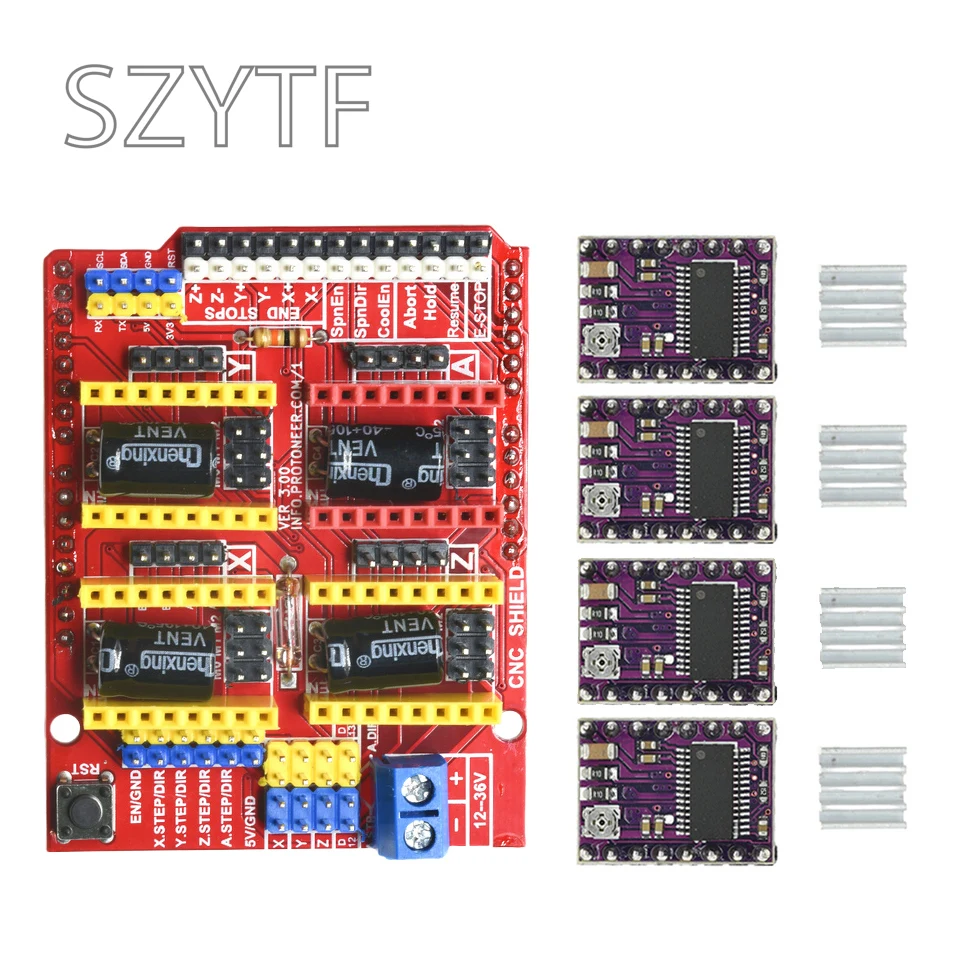
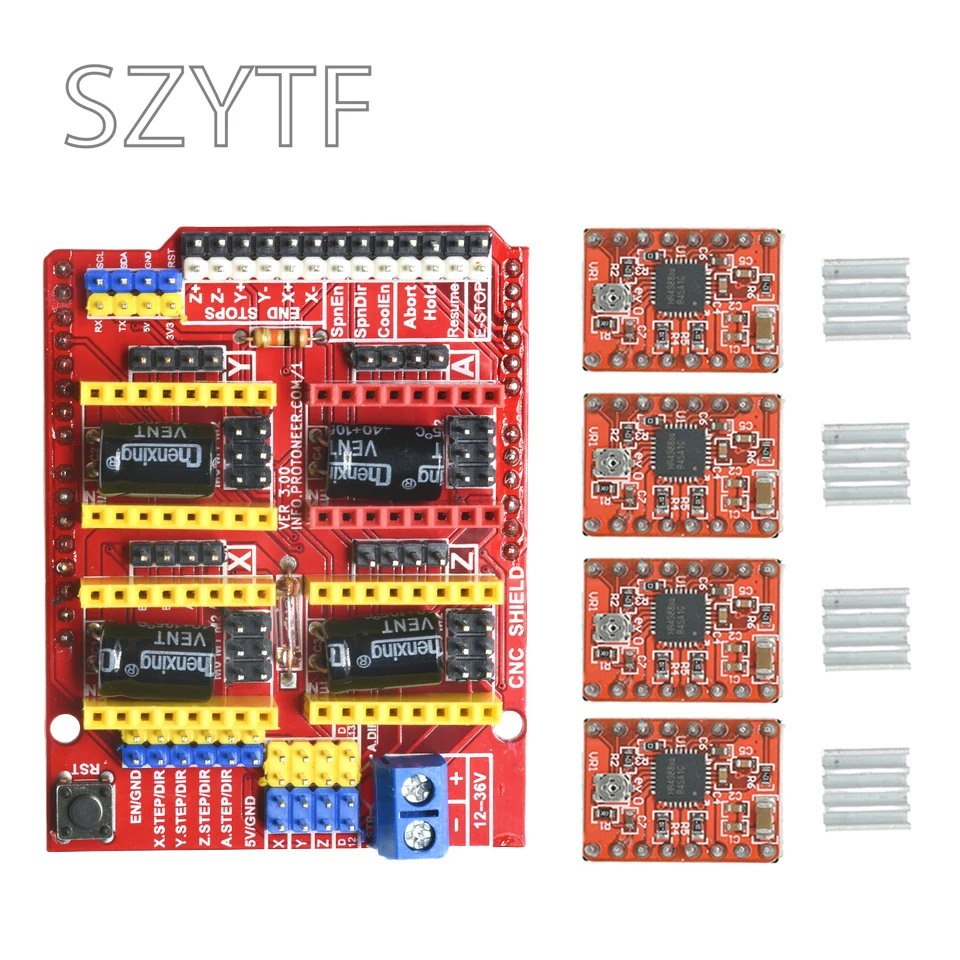
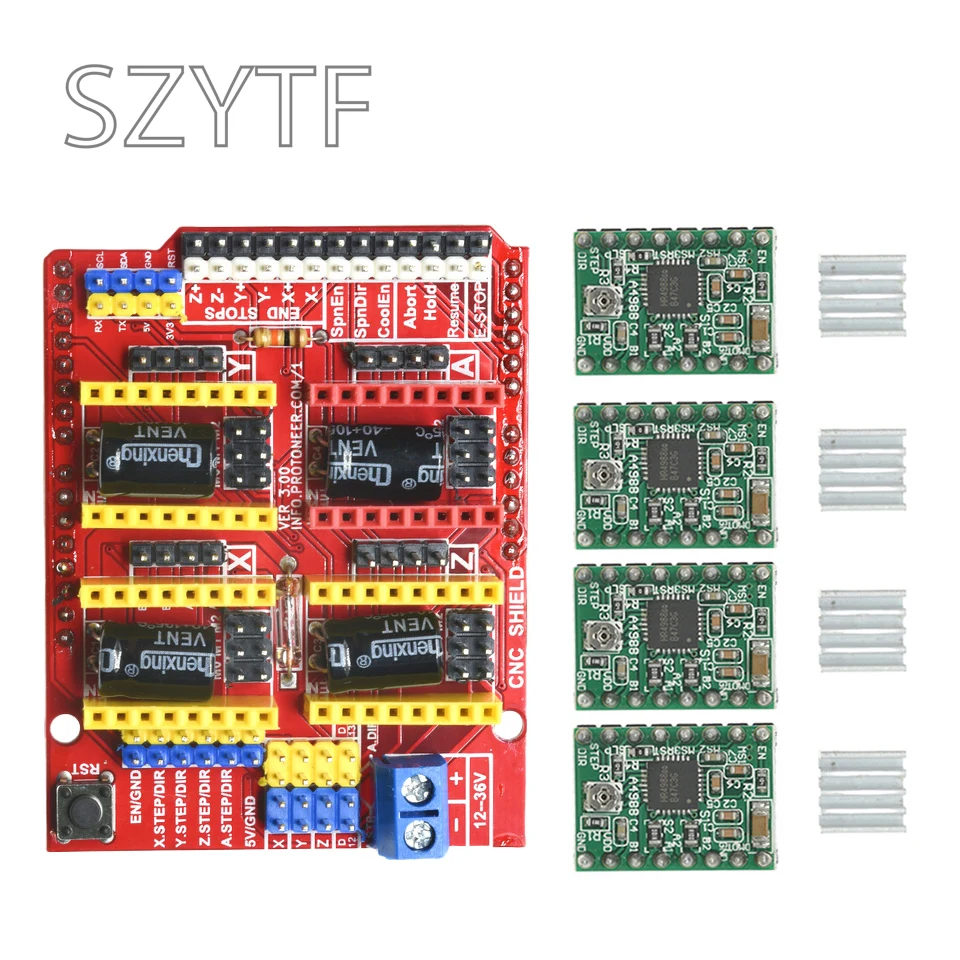
Escudo CNC V3
Primero, introducción del producto
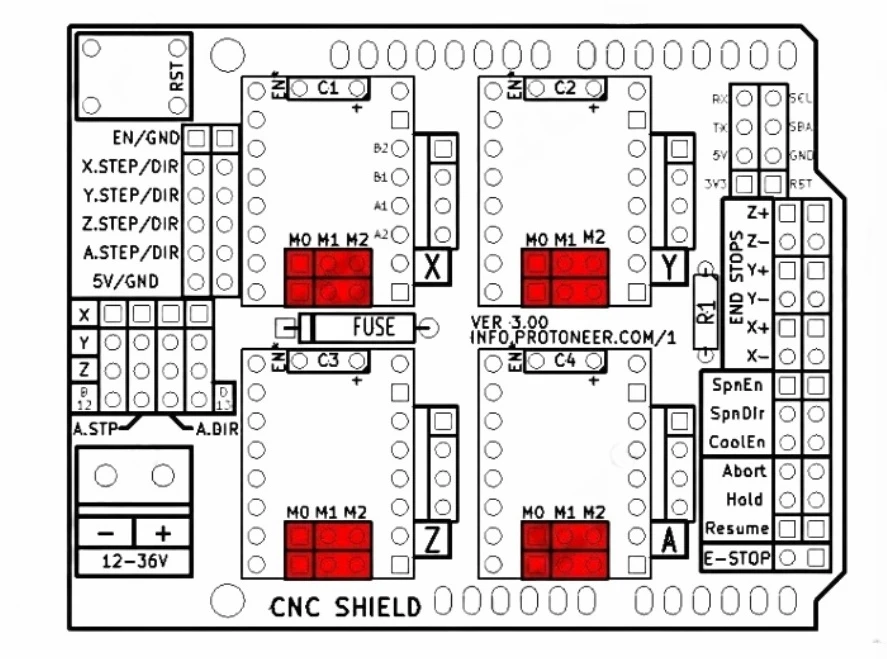
La Placa de expansión se puede utilizar como máquina de grabado, placa de expansión de accionamiento de impresora 3D, un total de 4 ranuras de módulo de accionamiento de motor paso a paso, puede conducir 4 motores sin entrada, Y cada motor paso a paso solo necesita 2 puertos IO, es decir, 6 puertos IO pueden ser una buena gestión de 3 motores paso a paso, El uso de muy conveniente, Diga adiós a la operación engorrosa del motor paso a paso tradicional.
UNO y Módulo l0 Correspondencia entre el puerto de Introducción
Las necesidades básicas del control del motor paso a paso otros pines están en la máquina de grabado, o3D Cuando se utilizó la impresora, aquí no hacemos Detallada, I0 Corresponde a laFigura superior.
Placa de expansión UNO -------------------------------
8 ------------- EN (activación de motor paso a paso, activo bajo)
7 ------------- Z.DIR (control de dirección del eje Z)
6 ------------- Y.DIR (control de dirección del eje Y)
5 -------------- X.DIR (control de dirección del eje X)
4 ------------- Z.STEP (control paso a paso del eje Z)
3 ------------- Y. PASO (control paso a paso del eje Y)
2 ------------- X. PASO (control paso a paso del eje X)
// Aquí hay un simple procedimiento de control de motor paso a paso,
# Definir EN 8 // habilitación de motor paso a paso, activo bajo
# Define X DIR 5 // Control de dirección del motor paso a paso del eje X
# Definir Y DIR 6 // Control de dirección del motor paso a paso del eje Y
# Define Z DIR 7 // Control de dirección del motor paso a paso del eje Z
# Define X STP 2 // control paso a paso del eje X
# Definir Y_STP 3 // control paso a paso del eje Y
# Definir Z STP 4 // control paso a paso del eje Z
/*
// Función: Función de paso: para controlar la dirección del motor paso a paso, el número de pasos.
// Parámetros: Control de dirección DIR, PIN dirPin DIR correspondiente al motor paso a paso,
Pasador de paso correspondiente al motor paso a paso, dando algunos pasos
// Sin valor devuelto
*/
Paso vacío (boolean DIR, dirPin byte, byte stepper Pin, int pasos)
{
Escritura digital (dirPin, DIR);
Retraso (50);
Para (int i=0; I
Escritura digital (paso a paso, ALTO);
Microsegundos de retardo (800);
Escritura digital (pin paso a paso, LOW);
Microsegundos de retardo (800);
}
}
Configuración nula () {// el motor paso a paso utilizado en el PIN l0 está configurado en salida
Modo PIN (X_DIR, SALIDA); Modo PIN (X_STP, SALIDA);
Modo PIN (Y DIR, SALIDA); Modo PIN (Y STP, SALIDA);
Modo PIN (Z_DIR, SALIDA); Modo PIN (Z _ STP, SALIDA);
Modo PIN (EN, SALIDA);
Escritura digital (EN, LOW);
Bucle vacío ( ) {
Paso (falso, X DIR, X STP, 200); Regazo de inversión del motor del eje X, 200 pasos para el Círculo
Paso (falso, Y DIR, Y STP, 200); /Vuelta de inversión del motor del eje Y, 200 pasos para el Círculo
Paso (falso, Z DIR,Z STP, 200); Regazo de inversión del motor del eje Z, 200 pasos para el Círculo
Retraso (1000);
Paso (verdadero, X DIR, X STP, 200); // El motor del eje X se transfiere a la vuelta, 200 pasos para circular
Paso (TRUE, Y DIR, Y _ STP, 200); /motor del eje Y se transfiere vuelta, 200 pasos para circular
Paso (verdadero, Z DIR,Z_STP, 200); // el motor del eje Z se transfiere vuelta, 200 pasos para circular
Retraso (1000);
}