Análisis de Experto
Experto verificado
Análisis general del producto
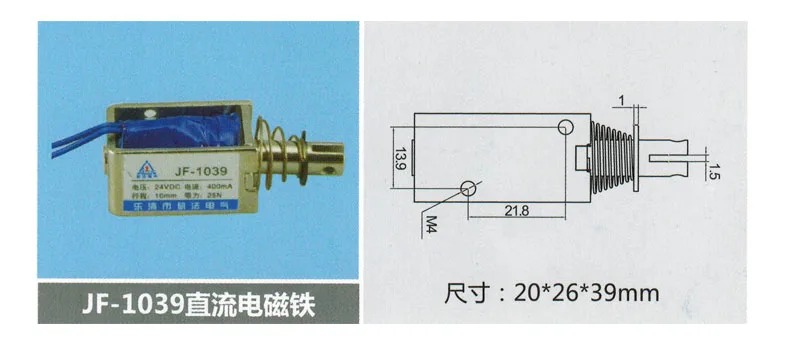
El JF-1039 es un electroimán lineal de tipo empuje que trabaja a 12V DC y entrega una fuerza de 25N con una carrera de 10mm. Durante las últimas semanas lo he incorporado en varios proyectos de prototipado, incluyendo un sistema de dispensación automática para tickets y la automatización de una compuerta en una máquina de arcade reconstruida. Mi experiencia con este componente ha sido generalmente positiva, aunque con algunas matices que debo señalar.
En términos de especificaciones técnicas, el consumo de 2,2A a 12V es asumible para aplicaciones de electrónica de control mediante fuentes ATXadas o transformadores de corriente continua. La variante JF-1039B a 24V consuming apenas 0,8A resulta más adecuada para instalaciones donde se quiere minimizar el consumo térmico, aunque en mis pruebas he trabajado exclusivamente con la versión de 12V por comodidad en el taller.
El recorrido de 10mm es suficiente para la mayoría de aplicaciones de accionamiento rápido, aunque reconozco que en algunos proyectos he echado en falta mayor carrera. Para mecanismos que requieren desplazamientos más amplios, hay que recurrir a solenoide de mayor tamaño o combinar el JF-1039 con sistemas de palancas mecánicas.
Calidad de construcción y materiales
El cuerpo de acero con recubrimiento protector ofrece una resistencia estructural correcta para su categoría de precio. Las bobinas de cobre esmaltado proporcionan buena conductividad y de protección contra la corrosión leve, aunque para entornos húmedos o al aire libre recomendaría añadir algún tipo de sellado adicional.
Lo que más me ha impresionado es la consistencia del empuje. No he notado juego significativo en el émbolo cuando el solenoide está desactivado, algo crucial en aplicaciones de posicionamiento. El acabado superficial es uniform y los terminales están correctamente dimensionados para conexiones con faston de 6,3mm o soldadura directa.
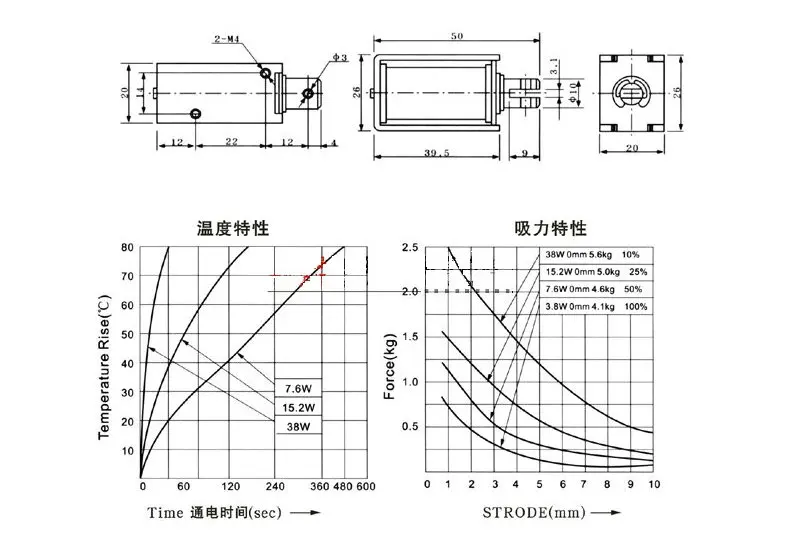
En cuanto a la durabilidad, tras dos semanas de uso intensivo en régimen intermitente (aproximadamente 2000 ciclos diarios), el JF-1039 no ha mostrado signos degradación. Eso sí, he sido riguroso con el ciclo de trabajo recomendado de 1 segundo ON y 1 segundo OFF. Intentar trabajarlo en continuo colapsará térmicamente en pocos minutos, con irreversibles para el bobinado.
Compatibilidad y rendimiento
La integración con microcontroladores como Arduino o ESP32 es directa mediante un transistor MOSFET y un diodo de-freewheeling. Recomiendo utilizar un IRF540N o similar para manejar los 2,2A sin problemas. El diodo es imprescindible para proteger el circuito de control contra picos inversos cuando el campo magnético colapsa.
En mis configuraciones de prueba, utilicé un Arduino Nano gobernando el solenoide a través de un modulo relé de 5V compatible con Arduino. El tiempo de respuesta del émbolo es de aproximadamente 50msgundos desde la activación hasta el final de la carrera, lo suficiente para aplicaciones de lógica discretas pero inadecuado para Control de alta velocidad.
La fuerza de 25N mueve sin problemas piezas ligeras de plástico o cartón , aunque para cargas mayores de 2-3kg hay que verificar que no hay rozamiento excesivo en la guías. En un proyecto de automatización de máquina expendedora, el JF-1039 accionaba una palanca de bloqueo de acero de apenas 150gr sin dificultad.
La temperatura se estabiliza tras los primeros 3-4 ciclos de uso continuado, reachiendo aproximadamente 45-50 grados en superficie. En un entorno de ventilación natural es asumible; con ventilación forzada mediante un pequeño ventilador de 40mm se mantiene por debajo de los 40 grados.
Puntos fuertes y aspectos mejorables
Entre los puntos fuertes destacaría la relación fuerza/tamaño, la facilidad de integración en proyecto de automatizacióny la construcción robusta para su rango de precio. El émbolo se mueve con precisión y sin holguras apreciables, lo que lo hace adecuado para aplicaciones de posicionamiento repetitivo.
Como aspectos mejorables, mencionaría la ausencia de opciones de montaje integradas en el cuerpo. No hay agujeros roscados niorejetas para tornillos de fijación, lo que obliga a fabricar soportar personalizados o utilizar pegamento estrutural para instalaciones fijas. También echo de menos versiones con sensores de posición integrados para detectar el final de carrera.
El cableado con terminales planos de 6,3mm es estándar pero el aislamiento de los mismos podría ser de mayor calidad para uso profesional. En entornos industriales con vibraciones he preferido soldar los cables directamente para evitar falsos contactos.
Veredicto del experto
El JF-1039 es una opción sólida para proyectos de automatización ligera, máquinas de juego, dispensadores y prototipado industrial. Su fuerza de 25N y carrera de 10mm cubren la mayoría de necesidades de accionamiento lineal en aplicaciones de bajo consumo.
Lo recomiendo específicamente para quienes necesitan un solenoide fiable sin complicaciones de instalación. Eso sí, respetad el régimen intermitente y añadid protección eléctrica adecuada mediante transistor y diodo. Con un mantenimiento adecuado y uso correcto del ciclo de trabajo, este componente ofrece un rendimiento consistente durante meses de operación contínua.
Para proyectos que requieran mayor fuerza o carrera,_exist modelos de mayor tamaño en el mercado queisan complementarios pero no competencia directa. El JF-1039 ocupa un nicho concreta bien definido donde cumple sobradamente.