
Enviado desde
Descripción
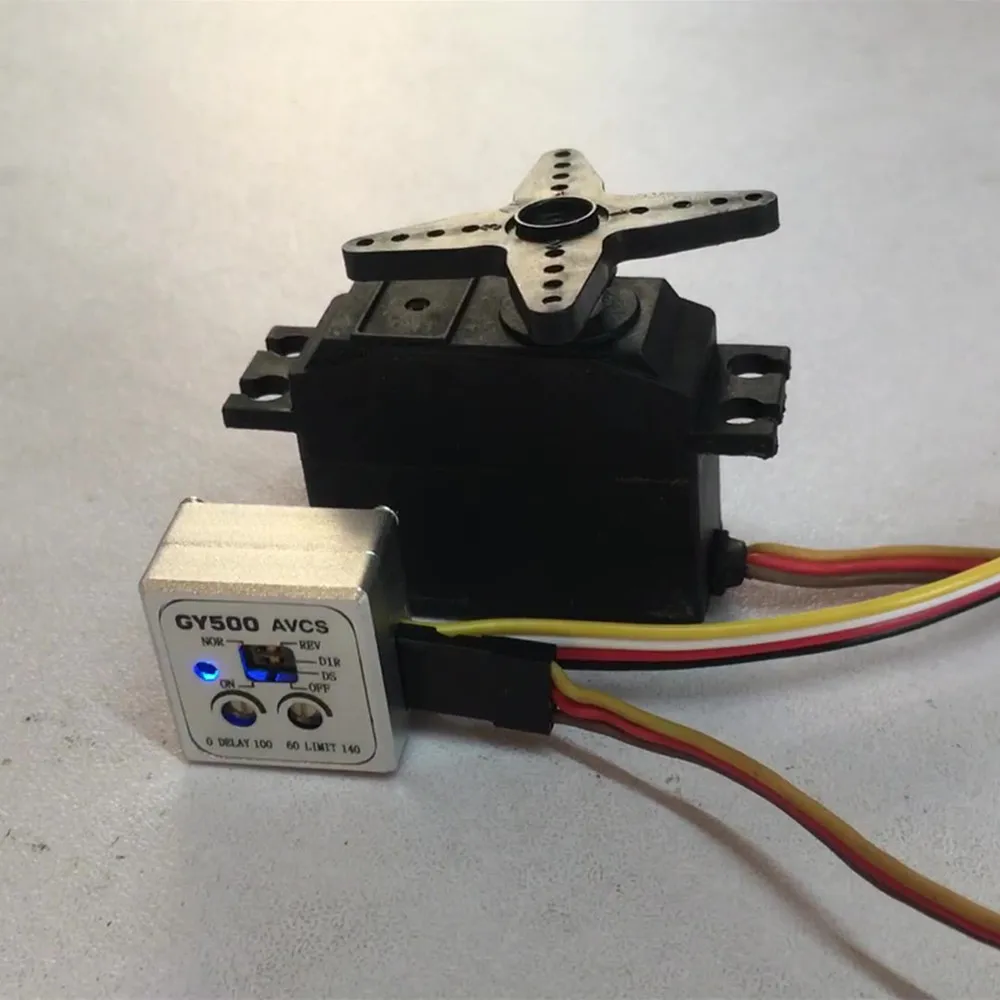
Características:
Cuando el timón es desviado por el viento cruzado, el giroscopio resistirá el desplazamiento del timón. Al mismo tiempo, el giroscopio calcula el ángulo de compensación y envía continuamente la señal de control para resistir el viento cruzado, por lo que incluso el viento cruzado Cuando el helicóptero es atacado continuamente, el timón aún no se moverá. En otras palabras, el giroscopio corrige automáticamente el desplazamiento del timón trasero causado por el viento cruzado. Cuando el helicóptero está haciendo la rotación, la oportunidad del timón de cola oscila de acuerdo con la velocidad angular de la rotación del cuerpo. Cuando el helicóptero deja de girar, la oportunidad del timón de cola determina la posición que debe detenerse. Esta es la función de compensación automática.
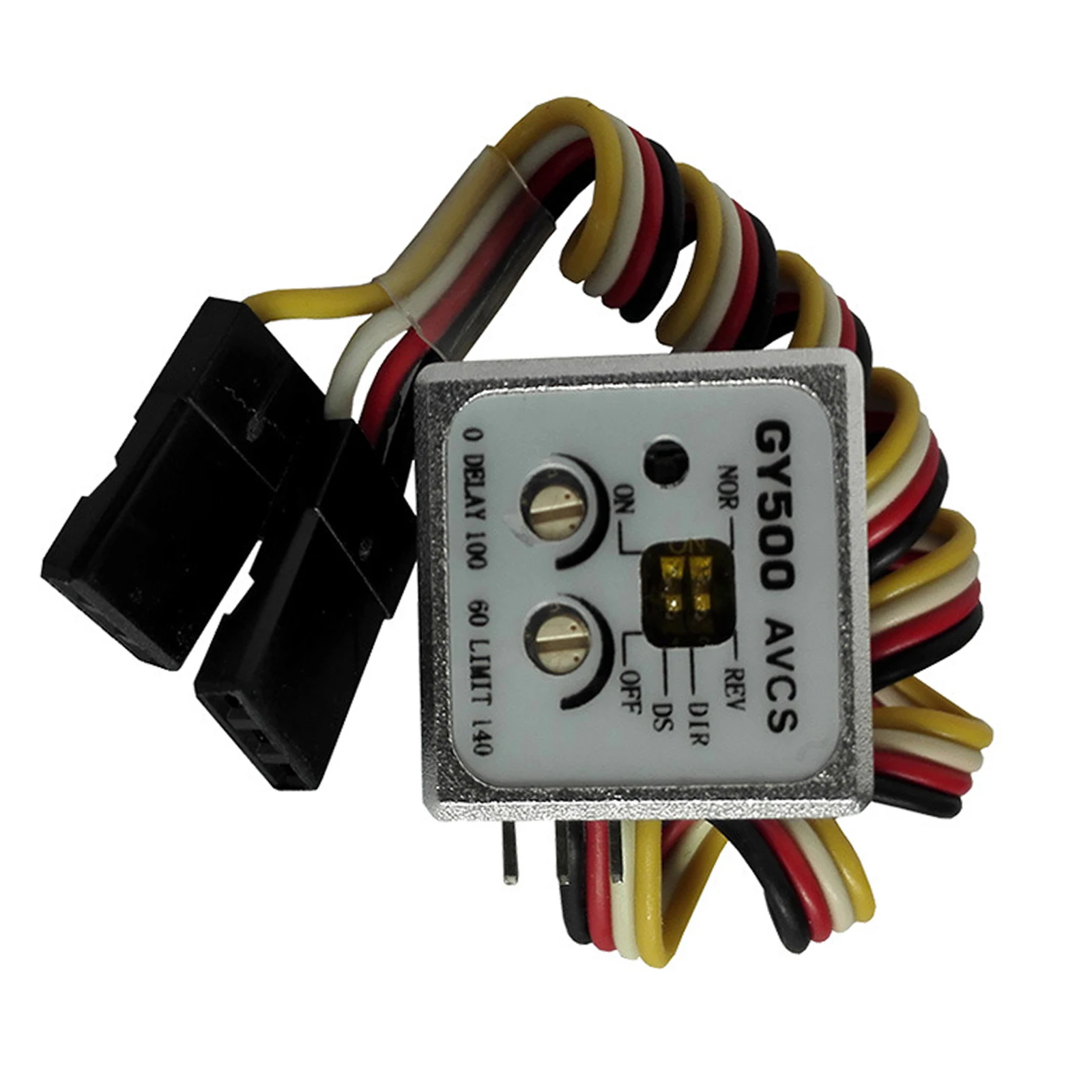
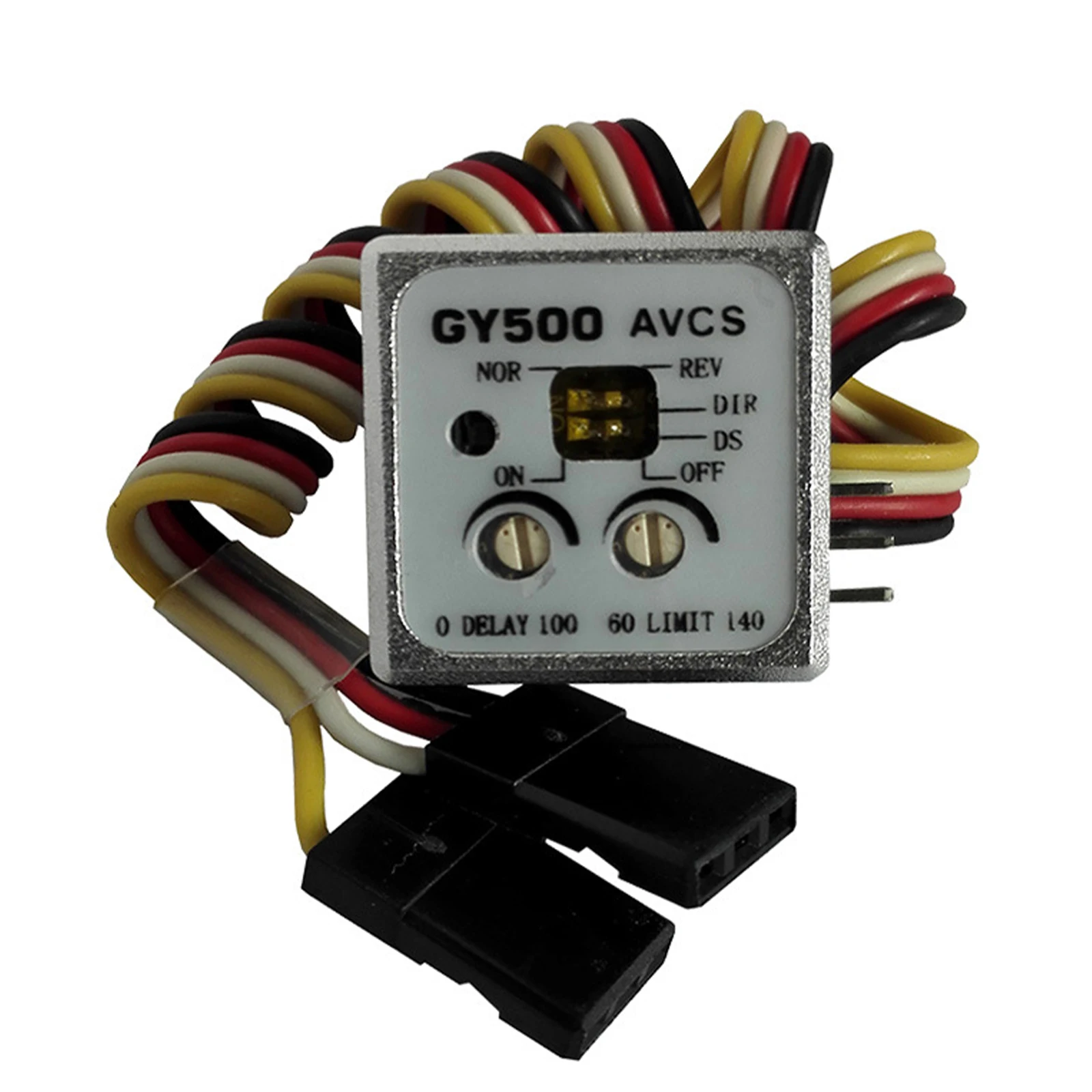
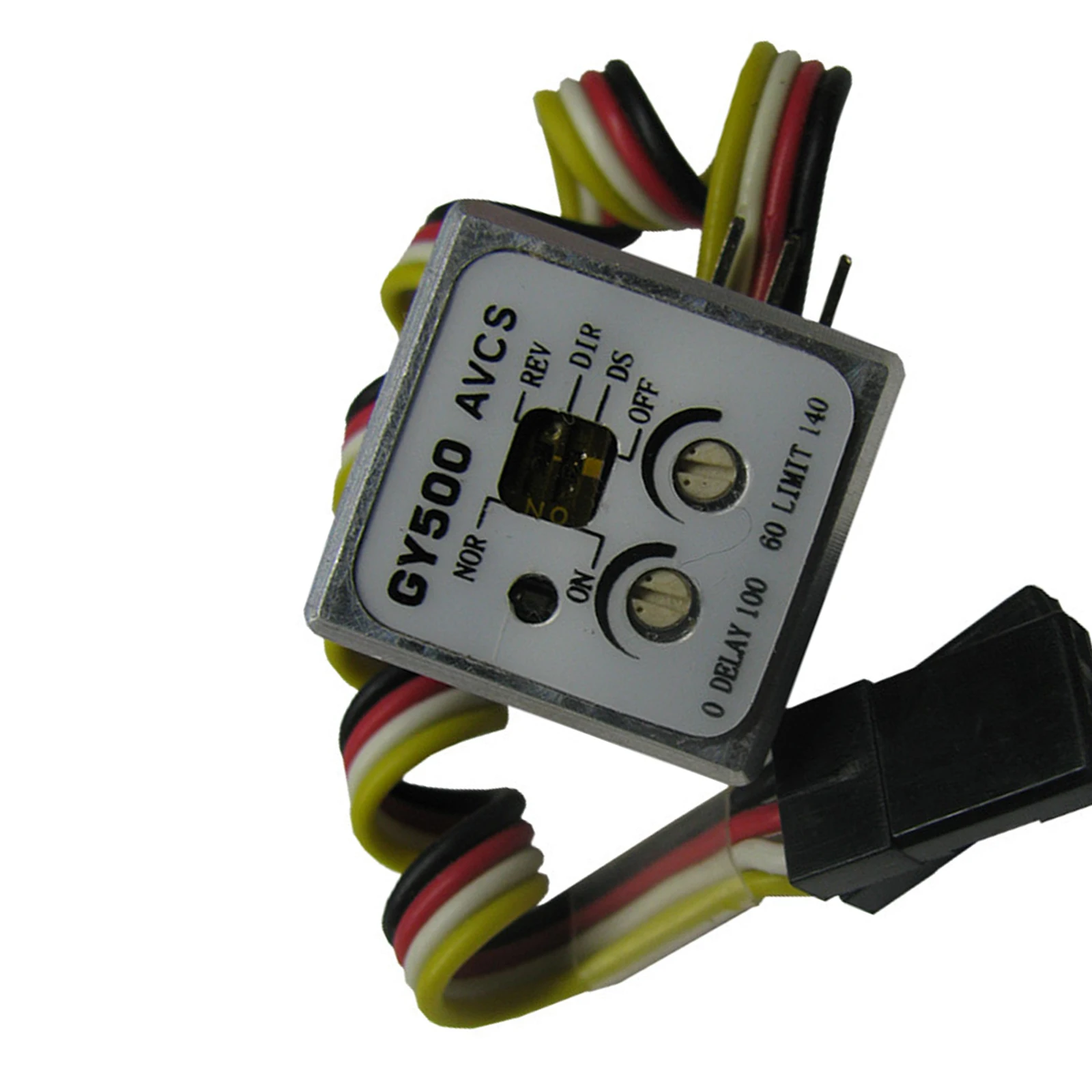
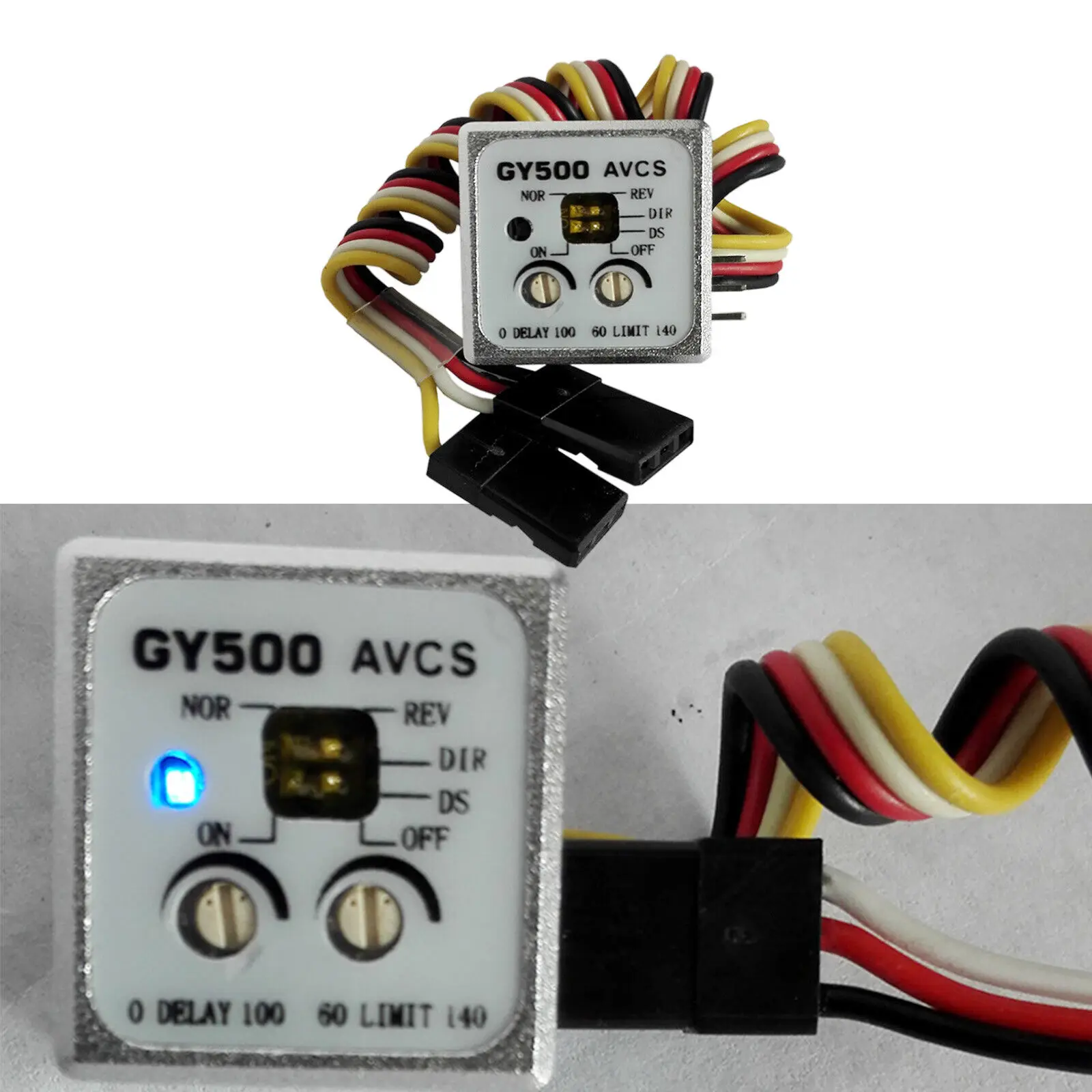
Interruptor de marcha atrás: cambia la dirección de control del giroscopio. La conmutación correcta debe hacerse de acuerdo con la dirección de rotación del rotor principal del helicóptero y la dirección del enlace del timón de cola.
Interruptor de modo DS: Interruptor de modo servo digital. Cuando use el servo digital, corte el interruptor de modo DS a la posición ON. Cuando utilice el servo general, corte a la posición de apagado. Si se gira a la posición ON, puede causar que el servo se queme. (El Formato de la señal de salida es diferente)
Perilla de ajuste de retardo de control: ajusta la velocidad de funcionamiento de la señal de control de cola. Si usa un engranaje de dirección más lento y encuentra que el timón trasero del helicóptero producirá seguimiento, gire la perilla en el sentido de las agujas del reloj para aumentar el tiempo de retraso y eliminar el fenómeno de seguimiento. Si el timón de cola utiliza un servo de alta velocidad, como un servo digital, ajuste la perilla a la posición 0.
Perilla de ajuste de carrera máxima del engranaje de dirección: establezca la cantidad máxima de carrera del servo del timón de cola. Dirija completamente el palo del timón hacia la izquierda y la derecha. Ajuste la perilla para que la carrera del timón trasero no exceda el rango máximo del manguito de paso trasero. Gire la perilla en el sentido de las agujas del reloj para aumentar la carrera.
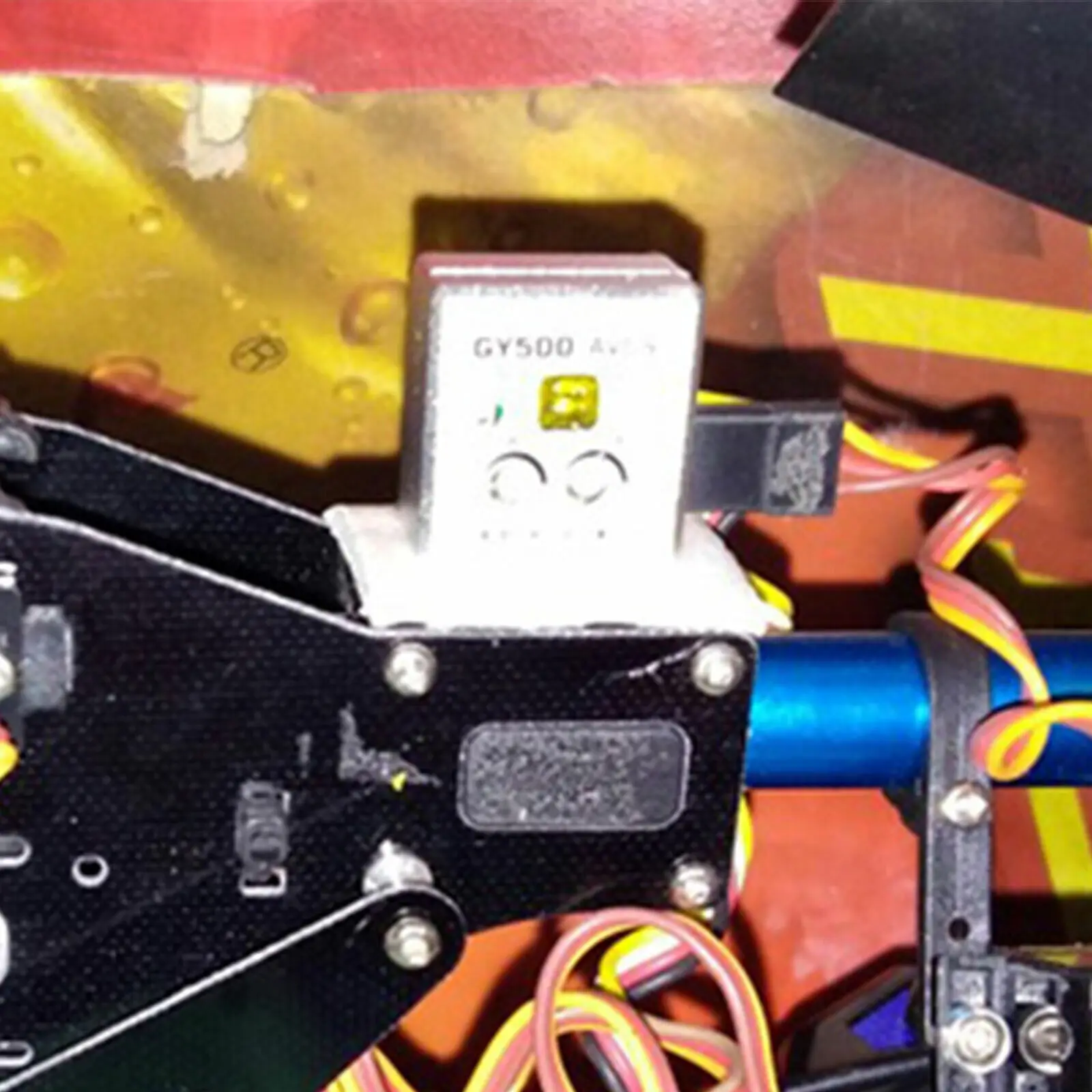
Conexión: la interfaz del canal de sensibilidad está conectada al canal de sensibilidad del receptor (generalmente CH5), que se puede utilizar simultáneamente para cambiar la sensibilidad y el modo del giroscopio (modo de bloqueo o modo general). Dado que el conector solo tiene una línea de señal de un solo núcleo, no tire de él con fuerza para evitar la desconexión. La interfaz del canal del timón está conectada al canal del timón (CH4) del receptor. La interfaz del servo del timón trasero está conectada al servo del timón trasero.
Instrucciones de función:
Para el sistema AVCS: el sistema AVCS elimina automáticamente el desplazamiento del timón causado por el viento u otros factores climáticos y varias actitudes del helicóptero, lo que hace que el timón sea fácil de manejar, adecuado para un vuelo elegante en 3D.
Para el sensor giroscópico: el nuevo sensor piezoeléctrico puede reducir eficazmente el desplazamiento del timón en vuelo.
Para servo digital (modo DS): compatible con servos digitales cuando se utiliza el modo DS, totalmente compatible con la respuesta de alta velocidad de los servos digitales.
Para la sensibilidad y el modo de operación del giroscopio del interruptor del control remoto: la sensibilidad del giroscopio se puede ajustar con el control remoto y el modo de operación del giroscopio (modo de bloqueo o modo normal) se puede cambiar.
El paquete incluye
1 giroscopio