Color
Descripción
Nota: Se pueden seleccionar un total de 5 paquetes; consulte la lista de paquetes a continuación.
Paquete 1 incluido:
- 1 x brazo robótico DOFBOT ensamblado
- 1 x Mapa para brazo de robot
- 1 joystick de juego USB
- 1 adaptador de corriente
- 1 x Placa de expansión para brazo de robot
- 1 cable de 40 pines.
- 1 cable de datos micro USB
- 6 x cintas negras
- 4 x bloques de construcción
- 6 x ventosas
- 1 destornillador
- 1 tarjeta TF de 32G
- 1 cámara
- 1 x Cable de conexión de cámara
- 1 x ventilador de control de temperatura inteligente
- 6 x Bolsas de Tornillos, Tuercas, Pilares de Cobre
-1 x Instrucciones
Nota:
- Otros artículos que se muestran en la imagen no están incluidos, únicamente con fines de demostración.¡Gracias por su comprensión!
Paquete 2 incluido:
- 1 placa base para Raspberry Pi 4B
- 1 x brazo robótico DOFBOT ensamblado
- 1 x Mapa para brazo de robot
- 1 joystick de juego USB
- 1 adaptador de corriente
- 1 x Placa de expansión para brazo de robot
- 1 cable de 40 pines.
- 1 cable de datos micro USB
- 6 x cintas negras
- 4 x bloques de construcción
- 6 x ventosas
- 1 destornillador
- 1 tarjeta TF de 32G
- 1 pantalla OLED
- 1 cámara
- 1 x Cable de conexión de cámara
- 1 x ventilador de control de temperatura inteligente
- 6 x Bolsas de Tornillos, Tuercas, Pilares de Cobre
-1 x Instrucciones
Nota:
- Otros artículos que se muestran en la imagen no están incluidos, únicamente con fines de demostración.¡Gracias por su comprensión!
Paquete 3 incluido:
- 1 placa base para Raspberry Pi 4B
- 1 x brazo robótico DOFBOT ensamblado
- 1 x Mapa para brazo de robot
- 1 joystick de juego USB
- 1 adaptador de corriente
- 1 x Placa de expansión para brazo de robot
- 1 cable de 40 pines.
- 1 cable de datos micro USB
- 6 x cintas negras
- 4 x bloques de construcción
- 6 x ventosas
- 1 destornillador
- 1 tarjeta TF de 32G
- 1 pantalla OLED
- 1 cámara
- 1 x Cable de conexión de cámara
- 1 x ventilador de control de temperatura inteligente
- 6 x Bolsas de Tornillos, Tuercas, Pilares de Cobre
-1 x Instrucciones
Nota:
- Otros artículos que se muestran en la imagen no están incluidos, únicamente con fines de demostración.¡Gracias por su comprensión!
Paquete 4 incluido (sin placa base):
- 1 x brazo robótico DOFBOT ensamblado
- 1 x Mapa para brazo de robot
- 1 joystick de juego USB
- 1 adaptador de corriente
- 1 x Placa de expansión para brazo de robot
- 1 cable de 40 pines.
- 1 cable de datos micro USB
- 6 x cintas negras
- 4 x bloques de construcción
- 6 x ventosas
- 1 destornillador
- 1 tarjeta TF de 32G
- 1 pantalla OLED
- 1 cámara
- 1 x Cable de conexión de cámara
- 1 x Juego de tarjetas de red inalámbrica
- 2 x soportes de fijación
- 6 x Bolsas de Tornillos, Tuercas, Pilares de Cobre
-1 x Instrucciones
Nota:
- Otros artículos que se muestran en la imagen no están incluidos, únicamente con fines de demostración.¡Gracias por su comprensión!
Paquete 5 incluido (con placa base):
- 1 placa base para JETSON NANO 4GB
- 1 x brazo robótico DOFBOT ensamblado
- 1 x Mapa para brazo de robot
- 1 joystick de juego USB
- 1 adaptador de corriente
- 1 x Placa de expansión para brazo de robot
- 1 cable de 40 pines.
- 1 cable de datos micro USB
- 6 x cintas negras
- 4 x bloques de construcción
- 6 x ventosas
- 1 destornillador
- 1 tarjeta TF de 32G
- 1 pantalla OLED
- 1 cámara
- 1 x Cable de conexión de cámara
- 1 x Juego de tarjetas de red inalámbrica
- 2 x soportes de fijación
- 6 x Bolsas de Tornillos, Tuercas, Pilares de Cobre
-1 x Instrucciones
Nota:
- Otros artículos que se muestran en la imagen no están incluidos, únicamente con fines de demostración.¡Gracias por su comprensión!
DOFBOT AI Vision brazo robótico brazo Robot de 6 ejes ensamblado con ROS sin placa base para Raspberry Pi
DOFBOT AI Vision brazo robótico 6 ejes brazo de Robot ensamblado con ROS con placa base para Raspberry Pi 4B/8G/4G
Tutorial:
Descripción:
El brazo del robot Dofbot Al vision está controlado por una placa base para Raspberry Pi 4B (opcional), OpenSource CV es la biblioteca de procesamiento de imágenes, la corriente principal para Jupyter Lab es la herramienta de desarrollo y Python3 es el lenguaje de programación principal.
La cámara está integrada con el cuerpo del brazo robótico y el reconocimiento visual hace que el brazo robótico sea más flexible.No solo puede realizar reconocimiento, seguimiento y agarre de colores, sino que también puede reconocer e interactuar con las características del cuerpo humano e incluso entrenar modelos de clasificación de basura para clasificar basura.A través del sistema de control del robot ROS, se simplifica el complejo control de movimiento del servo de bus serie 6-DOF.El funcionario proporciona un tutorial guiado de inicio rápido para ayudarle a controlar fácilmente el brazo robótico Dofbot AI Vision.
Ventajas:
- IA (Inteligencia Artificial)
- FPV (vista en primera persona)
- ROS (sistema operativo de robot)
- Visión de máquina
- Control de plataforma cruzada
- Para programación Python
- Control de seis DOF
- Servo de bus serie inteligente
- Aleación de aluminio anodizado
- Seguimiento móvil
- Trificación de basura
- Integración mano-ojo
Características:
- Brazo robótico DOFBOT AI Vision: Inteligencia artificial, la unidad de la mano y el ojo.Inteligencia artificial, los ojos siguen las manos.Movimiento
seguimiento, reconocimiento visual.Entrenamiento modelo, clasificación de basura.
- Base principal opcional para Raspberry Pi 4B, potentes capacidades de computación AI.CPU de 64 bits y 1,5 GHz de cuatro núcleos (proceso de 28 nm).GPU para Broadcom VideoCore VI a 500MHz.La placa base opcional para Raspberry Pi 4B/4GB presenta suficiente memoria y un rendimiento rentable.La placa base opcional para Raspberry Pi 4GB/8GB cuenta con una gran memoria para más bricolaje y actualizaciones.
- La perspectiva en primera persona controla el brazo robótico, haciendo que el reconocimiento visual sea más flexible.Modelado de simulación tridimensional, algoritmo complejo y potente, visión FPV, experiencia más fuerte.Control de vídeo FPV HD.
- Control de interconexión multiplataforma.Aplicación multifuncional para teléfono móvil para IOS/Android: múltiples juegos AI integrados, visualización en tiempo real de la pantalla de reconocimiento del brazo del robot y soporte de la interacción de gestos, seguimiento de movimientos, clasificación de basura y otros juegos al mismo tiempo.Control por computadora host de PC: además de la pantalla de video de la cámara FPV, la computadora host también ha agregado un modelo de simulación 3D del brazo robótico.El modelo 3D y la entidad giran sincrónicamente, permitiendo combinar la teoría y la práctica del control del brazo robótico.Control remoto del gamepad USB: además de la aplicación del teléfono móvil y el control por computadora, también hay un gamepad USB para experimentar la diversión de combinar múltiples grados de libertad y múltiples teclas.
- Interacción de reconocimiento de colores.1) Reconocimiento y seguimiento de colores: además de los colores estándar, también se pueden extraer colores personalizados para el reconocimiento y seguimiento del color del brazo robótico.2) Me dejas atrapar: coloca el bloque de madera en el área de reconocimiento de mapas.El brazo robótico distinguirá automáticamente el color actual y sujetará el bloque de madera al área de color correspondiente del mapa.3) Color
Agarrando: Coloque el bloque de madera frente a la cámara y, después de que el brazo robótico reconozca el color del bloque de madera, sujeta el
bloque de madera en el área de color correspondiente al área media.4) Interacción de color: elija el color favorito de DOFBOT, seguirá el
Obtenga el color objetivo hacia adelante y hacia atrás.
- Trena la clasificación de basura.1.Función básica: Hay varios bloques de madera con patrones de basura en el kit DOFBOT.Al cargar el modelo de clasificación de basura, se puede identificar el tipo de basura en el bloque de madera, el nombre de la basura y los datos de clasificación se devuelven a la APLICACIÓN y el brazo robótico clasifica la "baja" al área de clasificación correspondiente en el mapa.2.Función de desarrollador: También puede identificar el área calibrando el mapa, colocar múltiples bloques "peseados" en el área de identificación para un reconocimiento en tiempo real y clasificar continuamente varios "juniones" en el área de clasificación correspondiente en el mapa.
- Reconocimiento e interacción de funciones humanas: DOFBOT puede reconocer características humanas como gestos y rostros a través de la pantalla de la cámara, y completar acciones interactivas como agarrar, reconocer y rastrear.1.Interacción de gestos: DOFBOT puede reconocer una variedad de gestos y realizar acciones correspondientes para la interacción.2.Agarramiento de gestos: reconozca gestos digitales, apile las capas correspondientes y finalmente empuje hacia abajo los bloques de madera apilados debajo del gesto "puño".3.Reconocimiento y seguimiento de rostros: Detecta si hay una cara en la imagen actual.Después de reconocer el rostro, márquelo y siga el movimiento.
- Control de movimiento del robot: 01.Grupo de acción de aprendizaje personalizado con brazo robótico: gracias al servo de bus serie inteligente, DOFBOT puede leer y registrar el ángulo de cada rotación después de ingresar al modo de aprendizaje de acción para realizar el aprendizaje y repetir el grupo de acción.02.Interesantes grupos de acción fija: en la aplicación se proporcionan 8 tipos de grupos de acción fija.Puede hacer clic en el número de serie para obtener una vista previa y hacer clic para ejecutar y luego comenzar a ejecutar.03.Enseñanza simultánea de brazos robóticos: este juego requiere dos DOFBOT para controlar la enseñanza.Lea el ángulo de unión de los servos en el lado maestro del DOFBOT y transmítelo al lado esclavo en tiempo real, de modo que el esclavo pueda girar sincrónicamente según la actitud del maestro.04.Control de cinemática inversa 6-DOF: descompone el control de movimiento del servo del brazo del robot con 6-DOF.Calcule el ángulo de movimiento teórico de cada servo ingresando las coordenadas objetivo y controle simultáneamente el movimiento de cada servo de DOFBOT en combinación con el protocolo de servocontrol.05.Sistema operativo ROS: El sistema operativo del robot ROS es una colección de herramientas, bibliotecas y protocolos.Su objetivo es simplificar la plataforma robótica DOFBOT y construir robots complejos y potentes.
- Potente configuración de hardware: servos de bus serie inteligentes, aleación de aluminio anodizado, ventilador de control de temperatura inteligente, placa base opcional para Raspberry Pi 4B, placa de expansión con todas las funciones.
- Enseñanza guiada, uso rápido del funcionamiento de la aplicación.1) Escanea y combina la red: DOFBOT se conecta a WIFI escaneando el código QR y el emparejamiento.2) Calibración del servo: Al leer el ángulo de los servos, se realiza la calibración del ángulo del brazo robótico.3) Calibración de color: para principiantes y desarrolladores, proporcionamos calibración de color básica y funciones profesionales de calibración de color para evitar que los factores ambientales afecten el brazo robótico.
- Múltiples métodos de control remoto: Control de aplicación remota: para sistemas IOS y Android.Soporte para computadora host de PC, página web de Jupyter Lab
control de programación en línea, sistema ROS, controlador PS2.
- Materiales de aprendizaje masivos, que proporcionan código fuente de curso abierto, cursos de visión de IA, etc.
Especificaciones:
- Microprocesador: Para Broadcom BCM2711 64 bits 1,5 GHz cuatro núcleos + Núcleo de vídeo VI a 500 MHz
- Potencia de computación AI: 200GFLOP
- Sistema operativo: Para Ubuntu mate 20.04 LTS + ROS_Noetic
- Idioma de programación: Para Python
- Esquema de servo: servo inteligente de bus serie de 15 kg*5+6 kg*1
- Entrada: cámara gran angular, botón de parada de emergencia, botón de distribución de red, botón de reinicio, interfaz 2*IIC, interfaz de ventilador de 5V
- Salida: indicador RGB, pantalla OLED, timbre, 6 interfaces servo de bus, 6 interfaces servo PWM
- Solución de energía: adaptador de corriente 12V5A
- Interfaz de alimentación: interfaz de enchufe T
- Método de control remoto: aplicación de teléfono móvil, computadora superior de PC, para controlador PS2 (terminal de PC)
- Método de comunicación: red WiFi
- Protección de seguridad: protección contra sobrecorriente, protección de conexión inversa
- Material del manipulador: aluminio anodizado
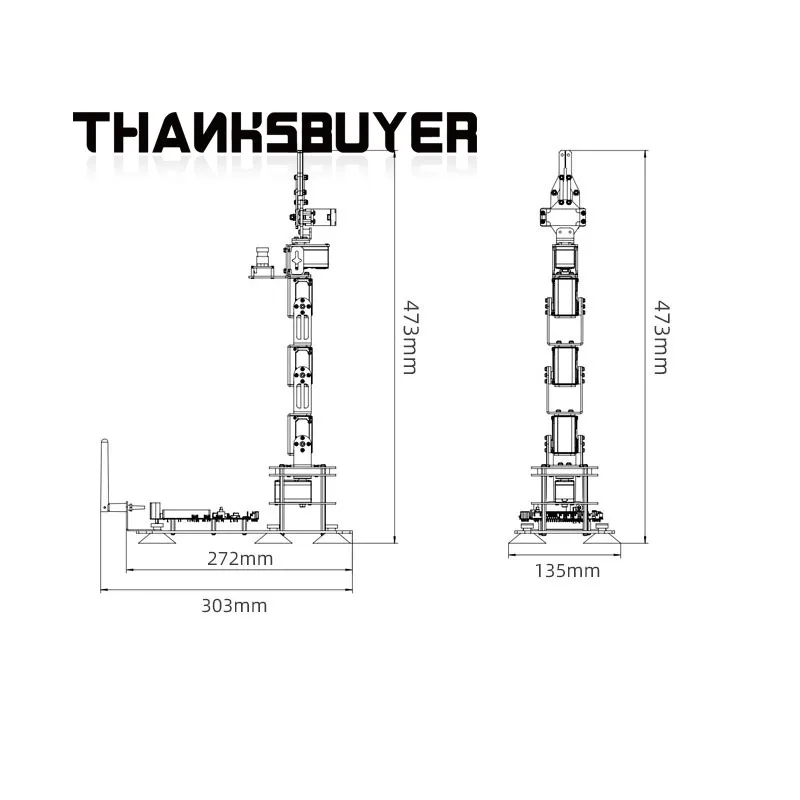
- Tamaño después del montaje: 272*135*473mm
- Peso después del montaje: 1256g
- Grado de libertad (DOF) del brazo robótico: 5 grados de libertad + pinza
- Carga efectiva: 200 g (el peso se puede sujetar directamente)
- Carga: 500 g (peso de sujeción y manipulación)
- Extensión del brazo: 350 mm
- Rango de agarre efectivo: radio ≤30cm, el área con el eje central como semicírculo
- Precisión de posicionamiento repetido: ±0,5 mm
- Voltaje de alimentación: 100~240V 50/60Hz
- Cámara: 300.000 píxeles, 110° cámara gran angular
- Resolución: 480p (640*480)
- Velocidad de fotogramas: 30 fps
- Modo de enfoque: ajusta manualmente el enfoque
Paquete incluido:
- 1 placa base para Raspberry Pi 4B
- 1 x brazo robótico DOFBOT ensamblado
- 1 x Mapa para brazo de robot
- 1 joystick de juego USB
- 1 adaptador de corriente
- 1 x Placa de expansión para brazo de robot
- 1 cable de 40 pines.
- 1 cable de datos micro USB
- 6 x cintas negras
- 4 x bloques de construcción
- 6 x ventosas
- 1 destornillador
- 1 tarjeta TF de 32G
- 1 pantalla OLED
- 1 cámara
- 1 x Cable de conexión de cámara
- 1 x ventilador de control de temperatura inteligente
- 6 x Bolsas de Tornillos, Tuercas, Pilares de Cobre
-1 x Instrucciones
Nota:
- Otros artículos que se muestran en la imagen no están incluidos, únicamente con fines de demostración. ¡Gracias por su comprensión!