

En Stock
104,99 €
Con la garantía de 
Color
Última actualización: 2026-03-04T01:18:12.496Z
Descripción
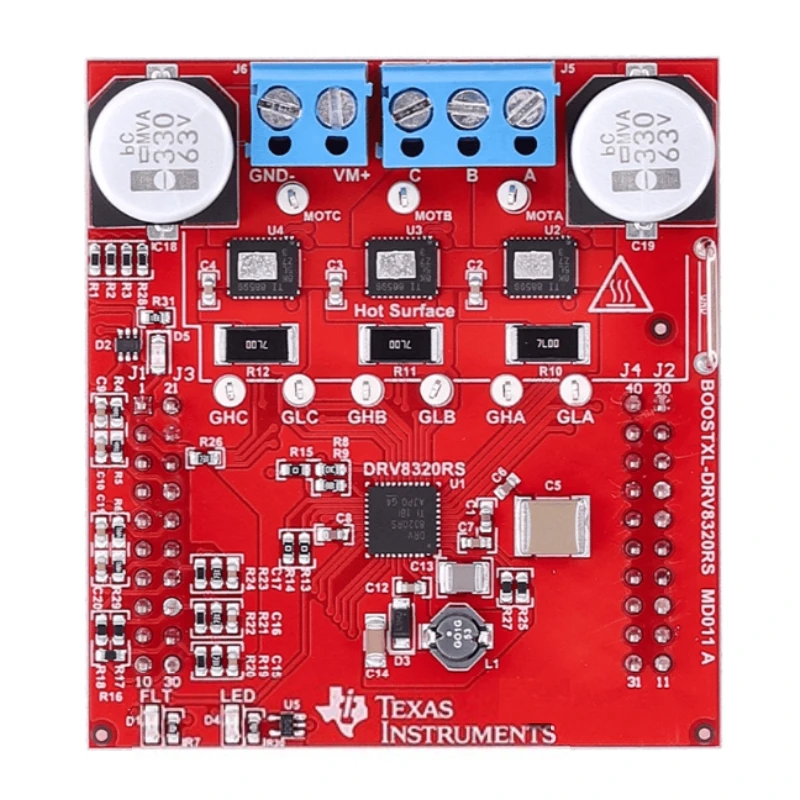
BOOSTXL-DRV8320RS Información del producto
Primero, descripción general del producto.
BOOSTXL-DRV8320RS es un módulo de expansión BoosterPack de controlador de motor compacto lanzado.El núcleo está equipado con un controlador de puerta de medio puente trifásico DRV8320RS.Está especialmente diseñado para verificar soluciones de accionamiento de motores de alta densidad y admite control de accionamiento de motores síncronos (CC con escobillas), CC sin escobillas (CC sin escobillas, BLDC) y motor síncrono de imán permanente (PMSM).El módulo integra un MOSFET de potencia integrado, una resistencia de muestreo de corriente, un circuito de protección completo y una interfaz BoosterPack estándar.Se puede conectar directamente a las placas de desarrollo MCU de la serie TI LaunchPad (como TM4C123, MSP432, AM243x), lo que elimina la necesidad de hardware de unidad de potencia adicional.Puede construir rápidamente un prototipo de control del motor para lograr un ajuste preciso de la velocidad, el par del motor y la protección contra fallas.Es adecuado para servoaccionamientos industriales, aparatos electrónicos de consumo (como motores de lavadora/condicionador de aire), herramientas eléctricas, equipos médicos (pequeños motores de instrumentos quirúrgicos), sistemas de alimentación de drones/robot, etc.Es una herramienta clave para reducir el umbral de desarrollo de los accionamientos de motor de alta potencia y verificar la estabilidad y seguridad de los esquemas de accionamiento.
En segundo lugar, especificaciones principales
1.Características del chip central (controlador de puerta DRV8320RS)
Capacidad de conducción y características de potencia:
Tipo de accionamiento: admite topología de medio puente trifásico (adecuada para BLDC/PMSM) o conexión paralela de una sola pata (adecuada para motores de CC con escobillas de alta corriente);
Corriente de salida: corriente de salida continua 15A (RMS, 25℃ entorno), corriente de salida máxima 25 A (transitorio, ≤ 100 ms), admite rango de potencia del motor de 50 W-500 W (dependiendo del voltaje de suministro y los parámetros del motor);
Voltaje de accionamiento de la puerta: admite fuente de alimentación de 8V-60V (VVM), fuente lógica de 3,3V/5V (VDD), compatible con señales de control MCU de diferentes niveles de voltaje;
Características de protección (protección industrial completa):
Protección contra sobrecorriente (OCP): admite detección de sobrecorriente ciclo por ciclo, con un umbral ajustable (0,1A-50A, configurado a través de una resistencia de muestreo externa) y apaga rápidamente la puerta después de activarla para evitar que el MOSFET se queme.
Protección contra sobretensión (OVP)/bloqueo de bajo voltaje (UVLO): desactiva automáticamente la unidad cuando el voltaje VVM sea 65 V (OVP) o 7 V (UVLO) para proteger el dispositivo de alimentación.
Protección contra sobrecalentamiento (OTP): El chip se apaga cuando la temperatura de la unión es 150° C, y se recupera automáticamente cuando la temperatura de la unión es 130° C para evitar daños por altas temperaturas.
Diagnóstico de fallas: salida de señales de falla a través del pin nFAULT, admite interfaz SPI para leer tipos de fallas (OCP/OVP/OTP/UVLO) y facilita el manejo de fallas a nivel del sistema.
Flexibilidad de control:
Admite modo de control PWM (6 entradas PWM independientes, adaptables al algoritmo de unidad de onda cuadrada/onda sinusoidal), modo de configuración SPI (tiempo muerto, umbral de sobrecorriente, intensidad de la unidad de puerta se puede ajustar dinámicamente a través de MCU);
Generador de tiempo muerto incorporado (0 ns-2 μs ajustable) para evitar cortocircuitos de los brazos del puente superior e inferior y adaptarse a MOSFET de diferentes frecuencias de conmutación (admite una frecuencia de conmutación de hasta 1 MHz).
2.Recursos e interfaces integrados
Interfaz de potencia y motor:
Terminal del motor: interfaz de línea de fase del motor de 3 vías (U/V/W, compatible con terminales de paso de 4,0 mm, adecuado para cable de motor AWG 12-16), interfaz de motor con escobillas de 2 vías (+/-, compatible con accionamiento paralelo de brazo de puente único ) ;
Interfaz de fuente de alimentación: terminales de paso de 4,0 mm de 2 vías (VVM +/-, compatible con entrada de 8 V-60 V CC), fusible de autorrecuperación de 10 A incorporado (protección contra sobrecorriente);
Muestreo de corriente: resistencia de potencia de alta precisión integrada de 2 mΩ (para muestreo de corriente de fase, compatible con el pin CSA de DRV8320RS, admite detección de corriente de ± 50 A), no se requiere resistencia de muestreo externa.
Interfaz de control y depuración:
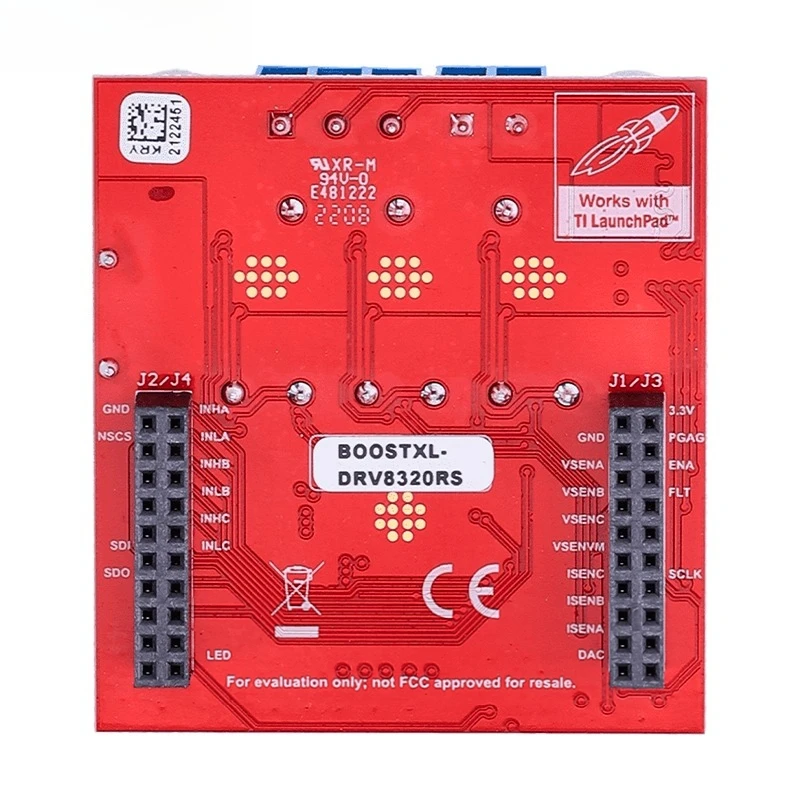
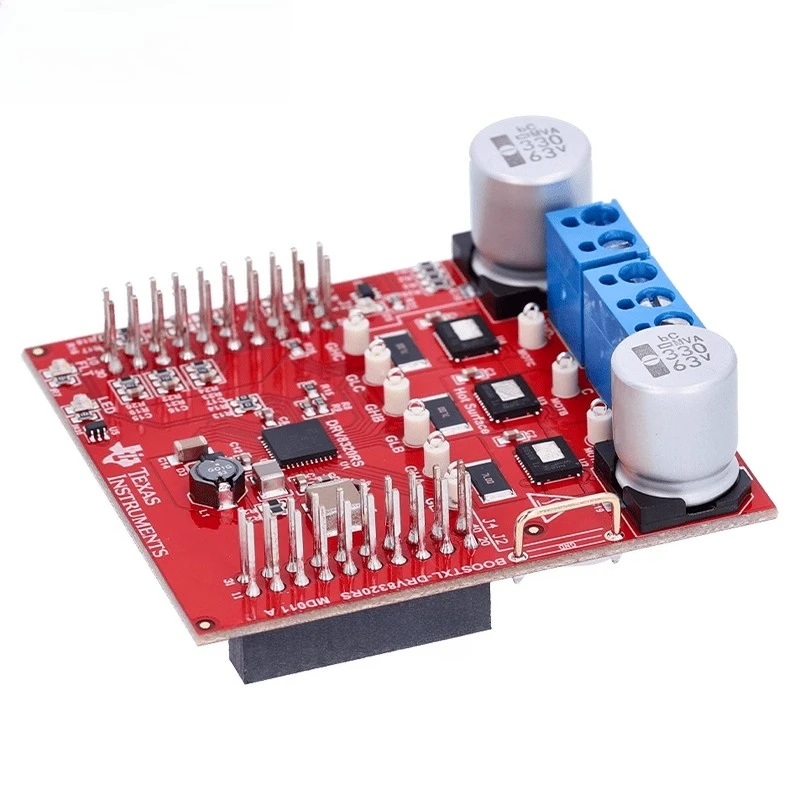
Interfaz estándar BoosterPack: pin de 2 × 20 pines (compatible con la especificación TI LaunchPad, espaciado de 2,54 mm), acoplando directamente los pines PWM, SPI y GPIO de la MCU para realizar la transmisión de la señal de control y el diagnóstico de fallas;
Asistencia de depuración: 2 indicadores LED (PWR: indicador de encendido, FAULT: indicador de estado de falla, el rojo siempre está encendido para indicar la falla, el verde siempre está encendido para indicar normal), 1 interruptor de dial de habilitación SPI (ON: habilita la configuración SPI, APAGADO: modo PWM predeterminado);
Circuito auxiliar:
Condensador de desacoplamiento: los terminales de fuente de alimentación VVM y VDD están integrados con condensadores cerámicos de alta frecuencia (10 μF + 100 nF) para suprimir la ondulación de energía;
Circuito de arranque: proporciona voltaje de accionamiento de puerta para MOSFET de la parte superior de la pierna, integra diodo de arranque y condensador (1 μF/50 V), no se requieren componentes de arranque externos.
3.Fuente de alimentación y parámetros ambientales.
Especificaciones de la fuente de alimentación:
Fuente de alimentación (VVM): 8V-60V DC (se recomienda 12V-48V, adecuada para motores industriales/de consumo convencionales), corriente de entrada máxima 25A (transientes);
Fuente de alimentación lógica (VDD): 3,3 V-5 V CC (suministrada por la MCU LaunchPad acoplada, corriente ≤ 100 mA);
Especificaciones ambientales y físicas:
Rango de temperatura de funcionamiento: -40° C -125° C (estándar industrial, adecuado para entornos industriales hostiles y cabinas de motores de alta temperatura);
Rango de temperatura de almacenamiento: -55℃ -150℃;
Dimensiones: 76,2 mm × 50,8 mm (según el tamaño estándar TI BoosterPack), la PCB adopta un diseño de placa de 4 capas (la capa de alimentación y la capa de señal están separadas para reducir la interferencia);
Características de disipación de calor: área de disipación de calor de piel de cobre integrada con PCB, admite disipador de calor externo (recomendado cuando la corriente continua es 10 A), para evitar el sobrecalentamiento del MOSFET.
4.Compatibilidad de software
Entorno de desarrollo: compatible con TI Code Composer Studio (CCS, compatible con Windows/Linux/macOS), TI MotorControl SDK (kit de desarrollo de software dedicado al control del motor), que proporciona plantillas de proyectos completas y herramientas de depuración;
Compatibilidad con algoritmos de control:
Código de ejemplo de control del motor incorporado: incluye accionamiento de onda cuadrada del motor BLDC (conmutación de 6 pasos), FOC del motor PMSM (control de orientación del campo magnético), algoritmo de regulación de velocidad PWM del motor de CC con escobillas, admite velocidad de circuito cerrado (controlador PI) y corriente control de circuito cerrado;
Herramienta de configuración: TI MotorControl GUI (herramienta de configuración gráfica), que puede ajustar la frecuencia PWM, el tiempo muerto, el umbral de sobrecorriente, los parámetros del controlador PI en tiempo real, monitorear la velocidad del motor, la corriente, el estado de falla y completar la optimización de los parámetros sin modificar el código.
Compatibilidad MCU: Compatible con la gama completa de placas de desarrollo LaunchPad de TI, como TM4C123G LaunchPad basada en Arm Cortex-M4, AM243x LaunchPad basada en Cortex-M7, MSP432P401R LaunchPad basado en Cortex-M0+, plug and play a través de la interfaz BoosterPack, no requiere cableado adicional.
III.Escenarios de aplicación típicos
1.Servo Industrial y Automatización
Accionamiento de servomotor pequeño: acoplamiento AM243x LaunchPad, utilizando alta corriente de salida DRV8320RS (15A RMS) y algoritmo FOC para lograr un control de posición de alta precisión (precisión de posicionamiento ± 0,1°) de servomotores industriales (como 57 motores paso a paso modificados BLDC), adecuados para correas transportadoras de líneas de producción, accionamiento de juntas de brazos robóticos;
Prototipo de inversor: ajuste dinámicamente los parámetros de conducción (como frecuencia de conmutación, tiempo muerto) a través de la interfaz SPI, verifique la eficiencia y el rendimiento EMC del inversor de potencia media y baja (menos de 500 W) y admita el voltaje de la red industrial (48 V CC. fuente de alimentación después de rectificación de 220 V CA).
2.Electrónica de consumo y electrodomésticos
Control de motor de electrodomésticos: acoplamiento con TM4C123 LaunchPad, desarrollo de un prototipo de accionamiento para motor de tambor de lavadora (BLDC) y motor de compresor de aire acondicionado (PMSM), uso de protección contra sobrecorriente/sobrecalentamiento para evitar daños por bloqueo del motor y adaptación al "silencioso y Requisitos de ahorro de energía" de los electrodomésticos (el algoritmo FOC reduce el ruido de funcionamiento del motor y aumenta la eficiencia hasta más
Herramientas eléctricas: accionamiento de taladros eléctricos de mano, motosierras con motores de CC con escobillas (conectados en paralelo a través de un solo brazo de puente, corriente de salida máxima de 20 A), logra una regulación de velocidad continua (ciclo de trabajo PWM 0% -100% ajustable), protección contra sobretensión para evitar la batería Fuente de alimentación de sobrecarga (adecuada para baterías de litio de 18V-24V).
3.Dispositivos médicos y portátiles
Motor de aparatos médicos: motor micro BLDC (potencia 10W-50W) que acciona pequeños instrumentos quirúrgicos (como herramientas quirúrgicas laparoscópicas), utilizando características de accionamiento de bajo ruido (optimización del tiempo muerto) para reducir la vibración del motor y adaptarse a los requisitos de "alta precisión y baja interferencia" de equipos médicos;
Potencia del dispositivo portátil: acoplamiento MSP432 LaunchPad (MCU de baja potencia), motor de cardán de dron de conducción, motor de junta de robot pequeño (potencia 50W-100W), fuente de alimentación lógica y MCU comparten 3,3 V, simplifica el diseño del circuito, se adapta a la escena portátil alimentada por batería.
4.Electrónica automotriz y transporte inteligente.
Motor auxiliar del vehículo: motor de CC con escobillas (fuente de alimentación del vehículo de 12 V) que impulsa el elevador de la ventana del automóvil y el ajuste del asiento, protección contra sobretensión para evitar la fluctuación de la fuente de alimentación del vehículo (como una caída de voltaje durante el arranque), protección contra sobrecalentamiento para adaptarse a la alta temperatura ambiente en el coche (60℃ -80℃);
Coche/AGV inteligente: impulsa el motor BLDC de la rueda motriz (potencia 100W-300W) del AGV (vehículo guiado automático), realiza compensación de par cuando el vehículo sube mediante el control de circuito cerrado actual y es adecuado para escenarios de transporte no tripulados en talleres de fábrica. y almacenes.
Cuarto, use precauciones
Seguridad del suministro de energía:
Cumplir estrictamente con el rango de fuente de alimentación VVM (8V-60V) y prohibir el acceso a voltajes superiores a 60V (se activará la protección OVP y la sobretensión a largo plazo puede quemar el DRV8320RS).
Cuando la potencia del motor supera los 100 W, un cable con un área de sección transversal de ≥ 2.Se debe utilizar 5 mm 2 para conectar el terminal de alimentación para evitar el sobrecalentamiento del cable;Se debe reservar un fusible de más de 10 A para el circuito de alimentación (el fusible de autorrecuperación integrado solo se utiliza para protección secundaria).
Especificación del cableado del motor:
Al acoplar el motor BLDC/PMSM, es necesario confirmar que la línea de fase U/V/W corresponde al terminal del módulo, y la conexión inversa hará que el motor retroceda o no arranque (la dirección se puede corregir cambiando cualquier líneas de dos fases).
Al accionar el motor con escobillas, conecte los electrodos positivo y negativo del motor a los terminales "+/-" y prohíba la conexión inversa (hará que el MOSFET realice un cortocircuito instantáneamente y activará la protección OCP);
Disipación de calor y protección:
Cuando la corriente de salida continua es 10A o la temperatura ambiente es 50° C, un disipador de calor (tamaño recomendado ≥ 30 mm × 30 mm × 5 mm, conductividad térmica ≥ 2 W/m · K) debe pegarse en el área MOSFET de potencia del módulo (área de disipación de calor de la piel de cobre PCB) para evitar que la temperatura de la unión supere los 150° C para activar OTP.
Evite el contacto directo con las manos con el terminal de alimentación y el área MOSFET durante el funcionamiento (la temperatura puede alcanzar los 80° C o superior durante el funcionamiento para evitar quemaduras).
Protección electrostática y eléctrica:
DRV8320RS es un dispositivo de potencia sensible a la electricidad estática.Al enchufar y desenchufar la interfaz BoosterPack o el cable del motor, es necesario usar una pulsera antiestática para evitar la avería de la electricidad estática de la puerta;
Cuando el módulo está cerca de equipos de alta potencia (como convertidores de frecuencia, máquinas de soldar), se debe agregar un filtro EMI (como una inductancia de modo común + condensador X) al extremo de la fuente de alimentación para suprimir la inestabilidad de la unidad causada por electromagnética. interferencia.
Elementos clave de configuración de software:
Por primera vez, debe configurar "parámetros del motor" (como voltaje nominal, corriente nominal y número de pares de polos) y "parámetros de protección" en el MotorControl SDK (se recomienda que el umbral de sobrecorriente sea 1.5 veces la corriente nominal del motor, y el tiempo muerto se establece en 50 ns-200 ns para evitar que los brazos del puente superior e inferior pasen);
Al depurar, inicie el motor desde un ciclo de trabajo bajo (10% -20%), y aumente gradualmente la velocidad para evitar que el arranque del ciclo de trabajo alto provoque que el motor se detenga y active OCP.
Primero, descripción general del producto.
BOOSTXL-DRV8320RS es un módulo de expansión BoosterPack de controlador de motor compacto lanzado.El núcleo está equipado con un controlador de puerta de medio puente trifásico DRV8320RS.Está especialmente diseñado para verificar soluciones de accionamiento de motores de alta densidad y admite control de accionamiento de motores síncronos (CC con escobillas), CC sin escobillas (CC sin escobillas, BLDC) y motor síncrono de imán permanente (PMSM).El módulo integra un MOSFET de potencia integrado, una resistencia de muestreo de corriente, un circuito de protección completo y una interfaz BoosterPack estándar.Se puede conectar directamente a las placas de desarrollo MCU de la serie TI LaunchPad (como TM4C123, MSP432, AM243x), lo que elimina la necesidad de hardware de unidad de potencia adicional.Puede construir rápidamente un prototipo de control del motor para lograr un ajuste preciso de la velocidad, el par del motor y la protección contra fallas.Es adecuado para servoaccionamientos industriales, aparatos electrónicos de consumo (como motores de lavadora/condicionador de aire), herramientas eléctricas, equipos médicos (pequeños motores de instrumentos quirúrgicos), sistemas de alimentación de drones/robot, etc.Es una herramienta clave para reducir el umbral de desarrollo de los accionamientos de motor de alta potencia y verificar la estabilidad y seguridad de los esquemas de accionamiento.
En segundo lugar, especificaciones principales
1.Características del chip central (controlador de puerta DRV8320RS)
Capacidad de conducción y características de potencia:
Tipo de accionamiento: admite topología de medio puente trifásico (adecuada para BLDC/PMSM) o conexión paralela de una sola pata (adecuada para motores de CC con escobillas de alta corriente);
Corriente de salida: corriente de salida continua 15A (RMS, 25℃ entorno), corriente de salida máxima 25 A (transitorio, ≤ 100 ms), admite rango de potencia del motor de 50 W-500 W (dependiendo del voltaje de suministro y los parámetros del motor);
Voltaje de accionamiento de la puerta: admite fuente de alimentación de 8V-60V (VVM), fuente lógica de 3,3V/5V (VDD), compatible con señales de control MCU de diferentes niveles de voltaje;
Características de protección (protección industrial completa):
Protección contra sobrecorriente (OCP): admite detección de sobrecorriente ciclo por ciclo, con un umbral ajustable (0,1A-50A, configurado a través de una resistencia de muestreo externa) y apaga rápidamente la puerta después de activarla para evitar que el MOSFET se queme.
Protección contra sobretensión (OVP)/bloqueo de bajo voltaje (UVLO): desactiva automáticamente la unidad cuando el voltaje VVM sea 65 V (OVP) o 7 V (UVLO) para proteger el dispositivo de alimentación.
Protección contra sobrecalentamiento (OTP): El chip se apaga cuando la temperatura de la unión es 150° C, y se recupera automáticamente cuando la temperatura de la unión es 130° C para evitar daños por altas temperaturas.
Diagnóstico de fallas: salida de señales de falla a través del pin nFAULT, admite interfaz SPI para leer tipos de fallas (OCP/OVP/OTP/UVLO) y facilita el manejo de fallas a nivel del sistema.
Flexibilidad de control:
Admite modo de control PWM (6 entradas PWM independientes, adaptables al algoritmo de unidad de onda cuadrada/onda sinusoidal), modo de configuración SPI (tiempo muerto, umbral de sobrecorriente, intensidad de la unidad de puerta se puede ajustar dinámicamente a través de MCU);
Generador de tiempo muerto incorporado (0 ns-2 μs ajustable) para evitar cortocircuitos de los brazos del puente superior e inferior y adaptarse a MOSFET de diferentes frecuencias de conmutación (admite una frecuencia de conmutación de hasta 1 MHz).
2.Recursos e interfaces integrados
Interfaz de potencia y motor:
Terminal del motor: interfaz de línea de fase del motor de 3 vías (U/V/W, compatible con terminales de paso de 4,0 mm, adecuado para cable de motor AWG 12-16), interfaz de motor con escobillas de 2 vías (+/-, compatible con accionamiento paralelo de brazo de puente único ) ;
Interfaz de fuente de alimentación: terminales de paso de 4,0 mm de 2 vías (VVM +/-, compatible con entrada de 8 V-60 V CC), fusible de autorrecuperación de 10 A incorporado (protección contra sobrecorriente);
Muestreo de corriente: resistencia de potencia de alta precisión integrada de 2 mΩ (para muestreo de corriente de fase, compatible con el pin CSA de DRV8320RS, admite detección de corriente de ± 50 A), no se requiere resistencia de muestreo externa.
Interfaz de control y depuración:
Interfaz estándar BoosterPack: pin de 2 × 20 pines (compatible con la especificación TI LaunchPad, espaciado de 2,54 mm), acoplando directamente los pines PWM, SPI y GPIO de la MCU para realizar la transmisión de la señal de control y el diagnóstico de fallas;
Asistencia de depuración: 2 indicadores LED (PWR: indicador de encendido, FAULT: indicador de estado de falla, el rojo siempre está encendido para indicar la falla, el verde siempre está encendido para indicar normal), 1 interruptor de dial de habilitación SPI (ON: habilita la configuración SPI, APAGADO: modo PWM predeterminado);
Circuito auxiliar:
Condensador de desacoplamiento: los terminales de fuente de alimentación VVM y VDD están integrados con condensadores cerámicos de alta frecuencia (10 μF + 100 nF) para suprimir la ondulación de energía;
Circuito de arranque: proporciona voltaje de accionamiento de puerta para MOSFET de la parte superior de la pierna, integra diodo de arranque y condensador (1 μF/50 V), no se requieren componentes de arranque externos.
3.Fuente de alimentación y parámetros ambientales.
Especificaciones de la fuente de alimentación:
Fuente de alimentación (VVM): 8V-60V DC (se recomienda 12V-48V, adecuada para motores industriales/de consumo convencionales), corriente de entrada máxima 25A (transientes);
Fuente de alimentación lógica (VDD): 3,3 V-5 V CC (suministrada por la MCU LaunchPad acoplada, corriente ≤ 100 mA);
Especificaciones ambientales y físicas:
Rango de temperatura de funcionamiento: -40° C -125° C (estándar industrial, adecuado para entornos industriales hostiles y cabinas de motores de alta temperatura);
Rango de temperatura de almacenamiento: -55℃ -150℃;
Dimensiones: 76,2 mm × 50,8 mm (según el tamaño estándar TI BoosterPack), la PCB adopta un diseño de placa de 4 capas (la capa de alimentación y la capa de señal están separadas para reducir la interferencia);
Características de disipación de calor: área de disipación de calor de piel de cobre integrada con PCB, admite disipador de calor externo (recomendado cuando la corriente continua es 10 A), para evitar el sobrecalentamiento del MOSFET.
4.Compatibilidad de software
Entorno de desarrollo: compatible con TI Code Composer Studio (CCS, compatible con Windows/Linux/macOS), TI MotorControl SDK (kit de desarrollo de software dedicado al control del motor), que proporciona plantillas de proyectos completas y herramientas de depuración;
Compatibilidad con algoritmos de control:
Código de ejemplo de control del motor incorporado: incluye accionamiento de onda cuadrada del motor BLDC (conmutación de 6 pasos), FOC del motor PMSM (control de orientación del campo magnético), algoritmo de regulación de velocidad PWM del motor de CC con escobillas, admite velocidad de circuito cerrado (controlador PI) y corriente control de circuito cerrado;
Herramienta de configuración: TI MotorControl GUI (herramienta de configuración gráfica), que puede ajustar la frecuencia PWM, el tiempo muerto, el umbral de sobrecorriente, los parámetros del controlador PI en tiempo real, monitorear la velocidad del motor, la corriente, el estado de falla y completar la optimización de los parámetros sin modificar el código.
Compatibilidad MCU: Compatible con la gama completa de placas de desarrollo LaunchPad de TI, como TM4C123G LaunchPad basada en Arm Cortex-M4, AM243x LaunchPad basada en Cortex-M7, MSP432P401R LaunchPad basado en Cortex-M0+, plug and play a través de la interfaz BoosterPack, no requiere cableado adicional.
III.Escenarios de aplicación típicos
1.Servo Industrial y Automatización
Accionamiento de servomotor pequeño: acoplamiento AM243x LaunchPad, utilizando alta corriente de salida DRV8320RS (15A RMS) y algoritmo FOC para lograr un control de posición de alta precisión (precisión de posicionamiento ± 0,1°) de servomotores industriales (como 57 motores paso a paso modificados BLDC), adecuados para correas transportadoras de líneas de producción, accionamiento de juntas de brazos robóticos;
Prototipo de inversor: ajuste dinámicamente los parámetros de conducción (como frecuencia de conmutación, tiempo muerto) a través de la interfaz SPI, verifique la eficiencia y el rendimiento EMC del inversor de potencia media y baja (menos de 500 W) y admita el voltaje de la red industrial (48 V CC. fuente de alimentación después de rectificación de 220 V CA).
2.Electrónica de consumo y electrodomésticos
Control de motor de electrodomésticos: acoplamiento con TM4C123 LaunchPad, desarrollo de un prototipo de accionamiento para motor de tambor de lavadora (BLDC) y motor de compresor de aire acondicionado (PMSM), uso de protección contra sobrecorriente/sobrecalentamiento para evitar daños por bloqueo del motor y adaptación al "silencioso y Requisitos de ahorro de energía" de los electrodomésticos (el algoritmo FOC reduce el ruido de funcionamiento del motor y aumenta la eficiencia hasta más
Herramientas eléctricas: accionamiento de taladros eléctricos de mano, motosierras con motores de CC con escobillas (conectados en paralelo a través de un solo brazo de puente, corriente de salida máxima de 20 A), logra una regulación de velocidad continua (ciclo de trabajo PWM 0% -100% ajustable), protección contra sobretensión para evitar la batería Fuente de alimentación de sobrecarga (adecuada para baterías de litio de 18V-24V).
3.Dispositivos médicos y portátiles
Motor de aparatos médicos: motor micro BLDC (potencia 10W-50W) que acciona pequeños instrumentos quirúrgicos (como herramientas quirúrgicas laparoscópicas), utilizando características de accionamiento de bajo ruido (optimización del tiempo muerto) para reducir la vibración del motor y adaptarse a los requisitos de "alta precisión y baja interferencia" de equipos médicos;
Potencia del dispositivo portátil: acoplamiento MSP432 LaunchPad (MCU de baja potencia), motor de cardán de dron de conducción, motor de junta de robot pequeño (potencia 50W-100W), fuente de alimentación lógica y MCU comparten 3,3 V, simplifica el diseño del circuito, se adapta a la escena portátil alimentada por batería.
4.Electrónica automotriz y transporte inteligente.
Motor auxiliar del vehículo: motor de CC con escobillas (fuente de alimentación del vehículo de 12 V) que impulsa el elevador de la ventana del automóvil y el ajuste del asiento, protección contra sobretensión para evitar la fluctuación de la fuente de alimentación del vehículo (como una caída de voltaje durante el arranque), protección contra sobrecalentamiento para adaptarse a la alta temperatura ambiente en el coche (60℃ -80℃);
Coche/AGV inteligente: impulsa el motor BLDC de la rueda motriz (potencia 100W-300W) del AGV (vehículo guiado automático), realiza compensación de par cuando el vehículo sube mediante el control de circuito cerrado actual y es adecuado para escenarios de transporte no tripulados en talleres de fábrica. y almacenes.
Cuarto, use precauciones
Seguridad del suministro de energía:
Cumplir estrictamente con el rango de fuente de alimentación VVM (8V-60V) y prohibir el acceso a voltajes superiores a 60V (se activará la protección OVP y la sobretensión a largo plazo puede quemar el DRV8320RS).
Cuando la potencia del motor supera los 100 W, un cable con un área de sección transversal de ≥ 2.Se debe utilizar 5 mm 2 para conectar el terminal de alimentación para evitar el sobrecalentamiento del cable;Se debe reservar un fusible de más de 10 A para el circuito de alimentación (el fusible de autorrecuperación integrado solo se utiliza para protección secundaria).
Especificación del cableado del motor:
Al acoplar el motor BLDC/PMSM, es necesario confirmar que la línea de fase U/V/W corresponde al terminal del módulo, y la conexión inversa hará que el motor retroceda o no arranque (la dirección se puede corregir cambiando cualquier líneas de dos fases).
Al accionar el motor con escobillas, conecte los electrodos positivo y negativo del motor a los terminales "+/-" y prohíba la conexión inversa (hará que el MOSFET realice un cortocircuito instantáneamente y activará la protección OCP);
Disipación de calor y protección:
Cuando la corriente de salida continua es 10A o la temperatura ambiente es 50° C, un disipador de calor (tamaño recomendado ≥ 30 mm × 30 mm × 5 mm, conductividad térmica ≥ 2 W/m · K) debe pegarse en el área MOSFET de potencia del módulo (área de disipación de calor de la piel de cobre PCB) para evitar que la temperatura de la unión supere los 150° C para activar OTP.
Evite el contacto directo con las manos con el terminal de alimentación y el área MOSFET durante el funcionamiento (la temperatura puede alcanzar los 80° C o superior durante el funcionamiento para evitar quemaduras).
Protección electrostática y eléctrica:
DRV8320RS es un dispositivo de potencia sensible a la electricidad estática.Al enchufar y desenchufar la interfaz BoosterPack o el cable del motor, es necesario usar una pulsera antiestática para evitar la avería de la electricidad estática de la puerta;
Cuando el módulo está cerca de equipos de alta potencia (como convertidores de frecuencia, máquinas de soldar), se debe agregar un filtro EMI (como una inductancia de modo común + condensador X) al extremo de la fuente de alimentación para suprimir la inestabilidad de la unidad causada por electromagnética. interferencia.
Elementos clave de configuración de software:
Por primera vez, debe configurar "parámetros del motor" (como voltaje nominal, corriente nominal y número de pares de polos) y "parámetros de protección" en el MotorControl SDK (se recomienda que el umbral de sobrecorriente sea 1.5 veces la corriente nominal del motor, y el tiempo muerto se establece en 50 ns-200 ns para evitar que los brazos del puente superior e inferior pasen);
Al depurar, inicie el motor desde un ciclo de trabajo bajo (10% -20%), y aumente gradualmente la velocidad para evitar que el arranque del ciclo de trabajo alto provoque que el motor se detenga y active OCP.





