
Descripción
Descripción:
Si alguna vez has pedido y cableado un sensor 9-DOF, es probable que también haya realizado el desafío de convertir los datos del sensor de un acelerómetro, giroscopio y magnetómetro en "Orientación espacial 3D real".La orientación es un problema difícil de resolver.Los algoritmos de fusión del sensor (la salsa secreta que combina datos de acelerómetro, magnetómetro y giroscopio en una salida de orientación estable de tres ejes) pueden ser ingeniosamente difíciles de alcanzar y implementar en sistemas de bajo costo en tiempo real.
En lugar de pasar semanas o meses jugando con algoritmos de diferente precisión y complejidad, puede tener datos significativos del sensor en minutos gracias al BNO055: un sensor inteligente de 9-DOF que hace que el sensor se fusionne por sí solo.Puede leer los datos directamente sobre el tío de Yerba de I2C y Bob.
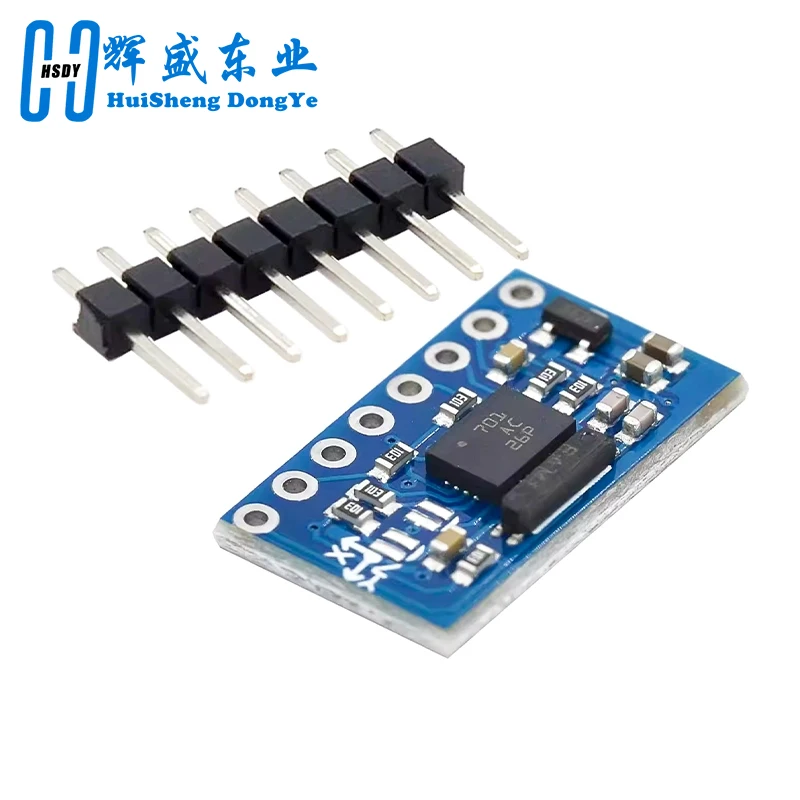
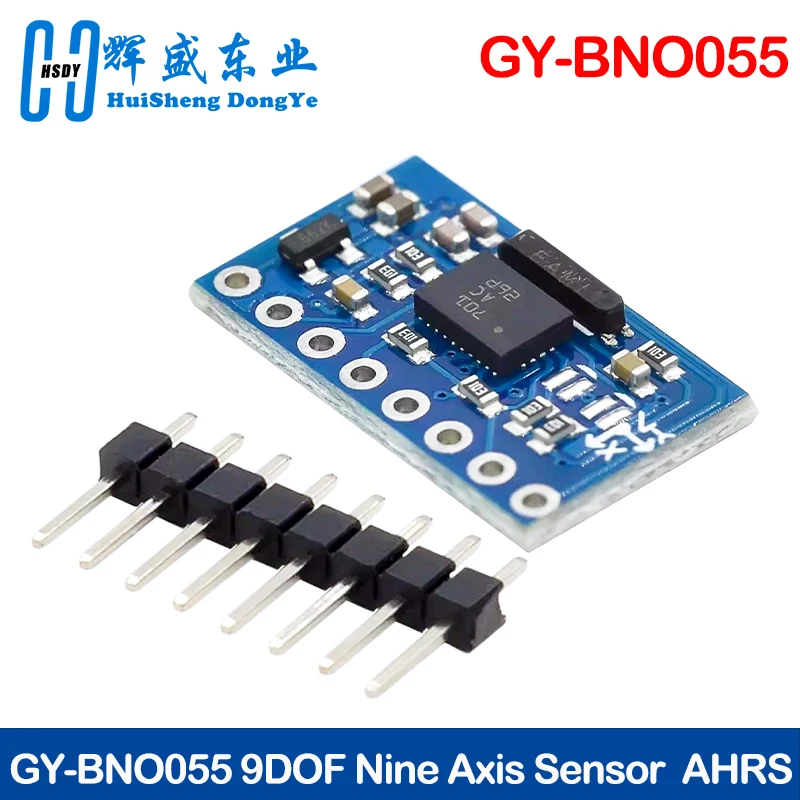
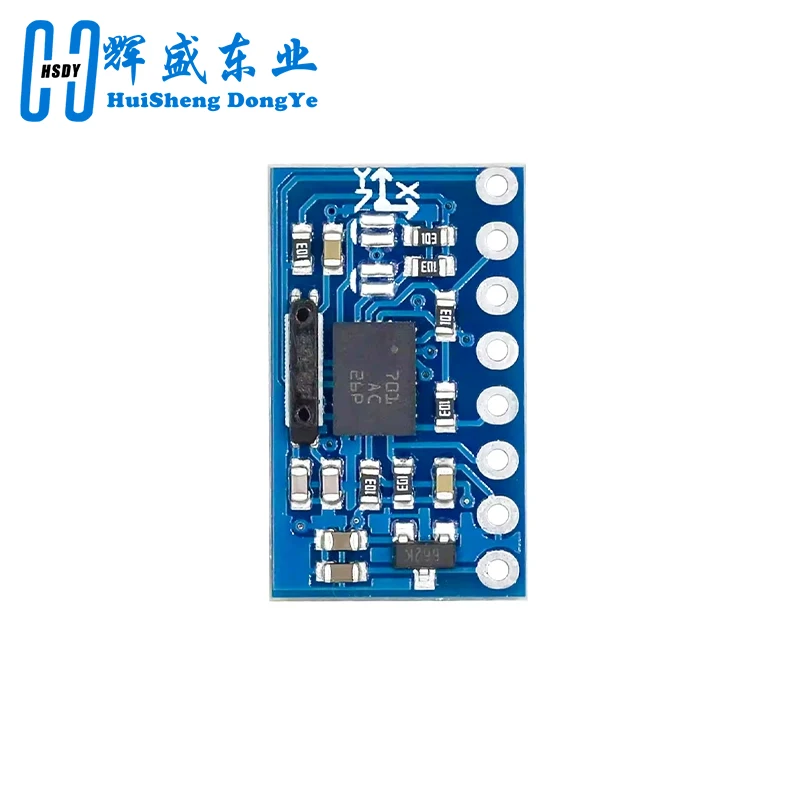
El sensor inteligente de orientación absoluta de 9 ejes BNO055 es un sistema en paquete (SiP), que integra un acelerómetro triaxial de 14 bits, un giroscopio triaxial de 16 bits con un rango de ±2000 grados por segundo, un sensor geomagnético triaxial y un ARM Cortex de 32 bits Microcontrolador M0+ que ejecuta el software de fusión del sensor Bosch Sensortec, en un solo paquete.Los juegos de chips correspondientes están integrados en una sola carcasa LGA de 3,8 mm x 5,2 mm x 1,1 mm de 28 pines.Para una integración óptima del sistema, el BNO055 está equipado con interfaces digitales bidireccionales I2C y UART.La interfaz I2C se puede programar para ejecutar con el protocolo HID-I2C convirtiendo el BNO055 en una solución de concentrador de sensor plug-and-play para dispositivos que ejecutan el sistema operativo Windows 8.0 o 8.1.
Características:
Usando chip: Original NUEVO BNO-055
Sensor integrado de 9 ejes y recursos MCU
Fuente de alimentación: 3-5v (regulador interno de voltaje de baja caída)
Modo de comunicación: IIC estándar/protocolo de comunicación en serie
El BNO055 puede generar los siguientes datos del sensor:
Orientación absoluta (Euler Vector, 100 Hz) Datos de orientación de tres ejes basados en un 360° esfera
Orientación absoluta (Quaterion, 100 Hz) Salida de cuaternion de cuatro puntos para una manipulación de datos más precisa
Velocidad angular Vector (20 Hz) Tres ejes de "velocidad de rotación" en rad/s
Velector de aceleración (100 Hz) Tres ejes de aceleración (gravedad + movimiento lineal) en m/s^2
Vector de intensidad de campo magnético (100 Hz) Tres ejes de detección de campo magnético en micro Tesla (uT)
Vector de aceleración lineal (100 Hz) Tres ejes de datos de aceleración lineal (aceleración menos gravedad) en m/s^2
Vector de gravedad (100 Hz) Tres ejes de aceleración gravitacional (menos cualquier movimiento) en m/s^2